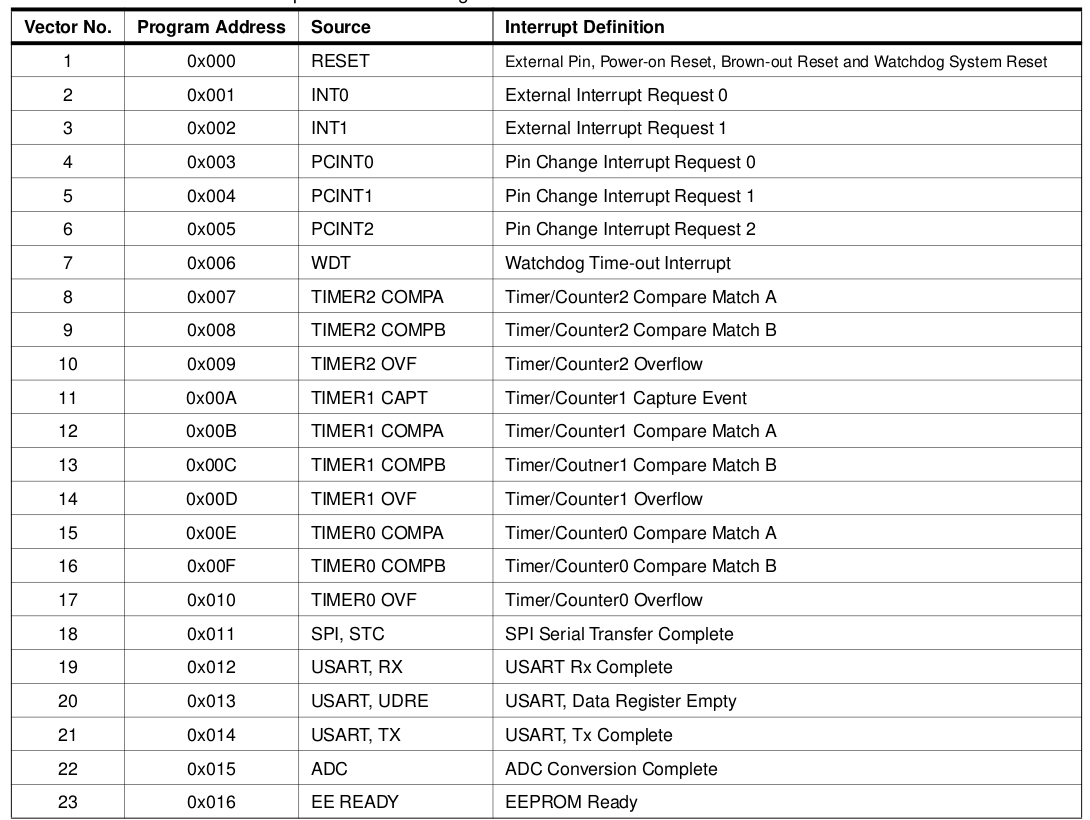
- Tabel met adres van ISR
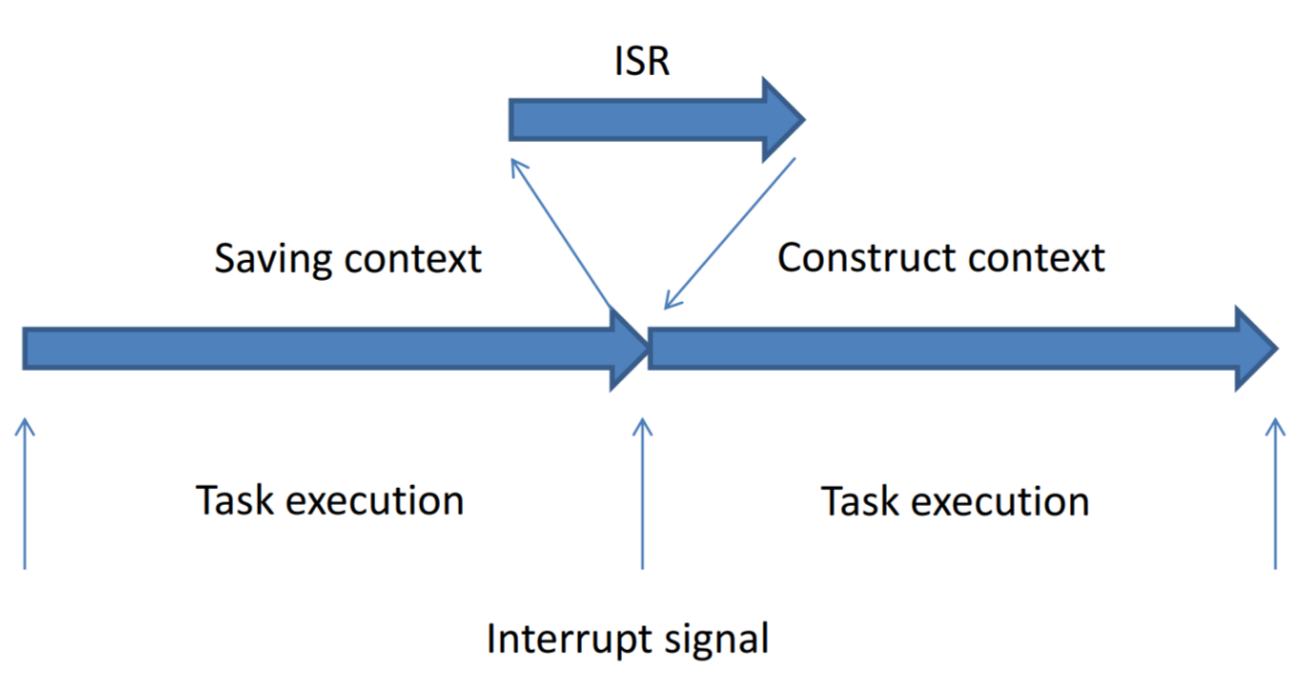
- Interrupt Service Routine
- 26 ISR beschikbaar
- Gerankschikt volgens prioriteit
- Vectors staan vanvoor aan het geheugen
#define INT0_vect_num 1
#define INT0_vect _VECTOR(1) /* External Interrupt Request 0 */
#define INT1_vect_num 2
#define INT1_vect _VECTOR(2) /* External Interrupt Request 1 */
#define PCINT0_vect_num 3
#define PCINT0_vect _VECTOR(3) /* Pin Change Interrupt Request 0 */
#define PCINT1_vect_num 4
#define PCINT1_vect _VECTOR(4) /* Pin Change Interrupt Request 0 */
#define PCINT2_vect_num 5
#define PCINT2_vect _VECTOR(5) /* Pin Change Interrupt Request 1 */
#define WDT_vect_num 6
#define WDT_vect _VECTOR(6) /* Watchdog Time-out Interrupt */
#define TIMER2_COMPA_vect_num 7
#define TIMER2_COMPA_vect _VECTOR(7) /* Timer/Counter2 Compare Match A */
#define TIMER2_COMPB_vect_num 8
#define TIMER2_COMPB_vect _VECTOR(8) /* Timer/Counter2 Compare Match A */
#define TIMER2_OVF_vect_num 9
#define TIMER2_OVF_vect _VECTOR(9) /* Timer/Counter2 Overflow */
#define TIMER1_CAPT_vect_num 10
#define TIMER1_CAPT_vect _VECTOR(10) /* Timer/Counter1 Capture Event */
#define TIMER1_COMPA_vect_num 11
#define TIMER1_COMPA_vect _VECTOR(11) /* Timer/Counter1 Compare Match A */
#define TIMER1_COMPB_vect_num 12
#define TIMER1_COMPB_vect _VECTOR(12) /* Timer/Counter1 Compare Match B */
#define TIMER1_OVF_vect_num 13
#define TIMER1_OVF_vect _VECTOR(13) /* Timer/Counter1 Overflow */
#define TIMER0_COMPA_vect_num 14
#define TIMER0_COMPA_vect _VECTOR(14) /* TimerCounter0 Compare Match A */
#define TIMER0_COMPB_vect_num 15
#define TIMER0_COMPB_vect _VECTOR(15) /* TimerCounter0 Compare Match B */
#define TIMER0_OVF_vect_num 16
#define TIMER0_OVF_vect _VECTOR(16) /* Timer/Couner0 Overflow */
#define SPI_STC_vect_num 17
#define SPI_STC_vect _VECTOR(17) /* SPI Serial Transfer Complete */
#define USART_RX_vect_num 18
#define USART_RX_vect _VECTOR(18) /* USART Rx Complete */
#define USART_UDRE_vect_num 19
#define USART_UDRE_vect _VECTOR(19) /* USART, Data Register Empty */
#define USART_TX_vect_num 20
#define USART_TX_vect _VECTOR(20) /* USART Tx Complete */
#define ADC_vect_num 21
#define ADC_vect _VECTOR(21) /* ADC Conversion Complete */
#define EE_READY_vect_num 22
#define EE_READY_vect _VECTOR(22) /* EEPROM Ready */
#define ANALOG_COMP_vect_num 23
#define ANALOG_COMP_vect _VECTOR(23) /* Analog Comparator */
#define TWI_vect_num 24
#define TWI_vect _VECTOR(24) /* Two-wire Serial Interface */
#define SPM_READY_vect_num 25
#define SPM_READY_vect _VECTOR(25) /* Store Program Memory Read */
#define _VECTORS_SIZE (26 * 4)
/* Constants */
#define SPM_PAGESIZE 128
#define RAMSTART (0x100)
#define RAMEND 0x8FF /* Last On-Chip SRAM Location */
#define XRAMSIZE 0
#define XRAMEND RAMEND
#define E2END 0x3FF