Les 4: Libraries en C/C++
Libraries
- Welke libraries zijn er beschikbaar?
- Hoe te gebruiken?
- Hoe maak je een library?
Beschikbare libraries
- Standaard libraries
- SPI
- Recommended libraries
- Adafruit NeoPixel
- Contributed libraries
- Adafruit NeoPixel
- Eigen libraries
- ProjectLib
Libraries gebruiken
- Via de IDE
- Sketch > Include Library > Librarie Selecteren
- Manueel
- #include <LibraryName.h>
- Bovenaan file
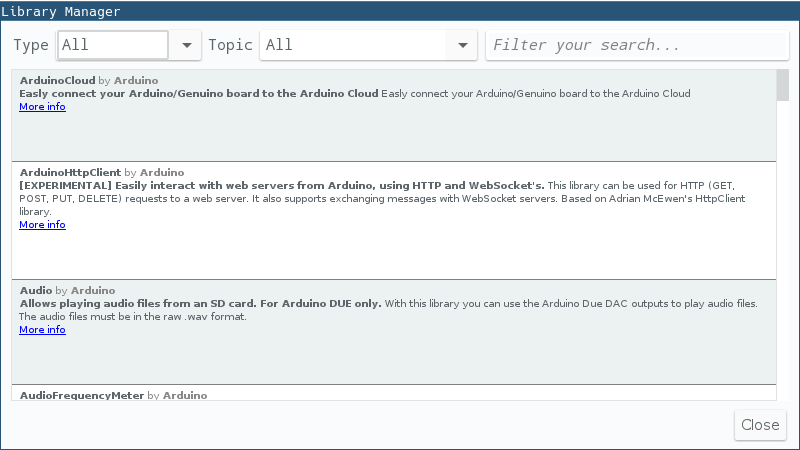
Library Manager
- Sketch > Include Library > Manage Libraries ...
- Makkelijk toevoegen van Libraries
- Libraries downloaden
- Een gezipte librarie toevoegen
- Sketch > Include Library > Add .ZIP Library ...
- Locatie
- $USER_DIR/Arduino/libraries
- /home/luytsm/Arduino/libraries
- c:/Users/luytsm/Arduino/libraries
Zelf een library maken
- Preprocessor
- Header Files
- Classes
Preprocessor
- Beginnend met #
- One-Liners
- Geen ;
- Een stap voor compilatie
- Substitutie
- Gebruik
- Directives
- Macros
#define THIS_EXISTS
#ifdef THIS_EXIST
//THEN DO THIS
#endif
#include <file>
#define PI 3.14
#define EDIT_BIT(bit) (1 << BIT )
Directives
| Directive | Description |
|---|---|
| #define | Substitutes a preprocessor macro. |
| #include | Inserts a particular header from another file. |
| #undef | Undefines a preprocessor macro. |
| #ifdef | Returns true if this macro is defined. |
| #ifndef | Returns true if this macro is not defined. |
| #if | Tests if a compile time condition is true. |
| #else | The alternative for #if. |
| #elif | #else and #if in one statement. |
| #endif | Ends preprocessor conditional. |
| #error | Prints error message on stderr. |
Macros
- #define
- Object-Like Macro
- Function-Like Macro
- Substitutie
#define THIS_EXISTS
#define PI 3.14
#define EDIT_BIT(bit) (1 << BIT )
Verschill Macro en Functies
| Macro | Functie |
|---|---|
| Macro is Preprocessed | Function is Compiled |
| No Type Checking | Type Checking is Done |
| Code Length Increases | Code Length remains Same |
| Use of macro can lead to side effect | No side Effect |
| Speed of Execution is Faster | Speed of Execution is Slower |
| Before Compilation macro name is replaced by macro value | During function call , Transfer of Control takes place |
| Useful where small code appears many time | Useful where large code appears many time |
| Generally Macros do not extend beyond one line | Function can be of any number of lines |
| Macro does not Check Compile Errors | Function Checks Compile Errors |
Conditionele Macros
#define DEBUG
#ifdef DEBUG
#define DEBUG_INIT() char sDebug[128];
#define DEBUG_PRINTHEX(T, v) Serial.print(T); sprintf(sDebug, "%x\n\r", v); Serial.print(sDebug);
#define DEBUG_PRINTDEC(T, v) Serial.print(T); sprintf(sDebug, "%d\n\r", v); Serial.print(sDebug);
#define DEBUG_HALT() (Serial.available() == 0); Serial.setTimeout(1); Serial.readBytes(sDebug, 1);
#else
#define DEBUG_INIT()
#define DEBUG_PRINTHEX(T, v)
#define DEBUG_PRINTDEC(T, v)
#define DEBUG_HALT()
#endif
Optimalisatie
Test Code met Variabele
#include <stdio.h>
static const foo = 6;
int main() {
printf("%d", foo);
return 0;
}
Test Code met Macro
#include <stdio.h>
#define foo 6
int main() {
printf("%d",foo);
return 0;
}
Gecompileerde ASM Code met Variabele
push rbp
mov rbp,rsp
sub rsp,0x20
call d
mov eax,0x6
mov edx,eax
lea rcx,[rip+Ox4]
call 20
mov eax,0x0
add rsp,0x20
pop rbp
ret
nop
Gecompileerde ASM Code met Macro
push rbp
mov rbp,rsp
sub rsp,0x20
call d
mov edx,0x6
lea rcx,[rip+Ox0]
call le
mov eax,0x0
add rsp,0x20
pop rbp
ret
nop
Gecompileerde Code
sub rsp,Ox28
call 9
lea rcx,[rip+Ox0]
mov edx,0x6
call 1a
xor eax,eax
add rsp,Ox28
ret
nop
Vooruitgang in compiler technologie heeft er voor gezorgd dat de performatie tussen van preprocessors verdwenen is
Header Files
- Source file: .cpp
- Header file: .h
- Gebruik:
- definiëren van:
- Functie prototypes
- Variabelen
- Macros
- Bevat geen logica
- "#include" in source file
Header file gebruiken
- Door preprocessor te gebruiken
- Declareer dit in het begin van de source file
- #include "TestHeader.h"
- "Zoekt in folder"
- #include <TestHeader.h>
- "Zoekt in PATH"
#include "mylib.h"
#include <mylib.h>
int main(){
}
Werking include
int ledPin = 7;
#include "test_header.h"
int state = HIGH;
void setup(){
//DO SOMETHING
}
void loop(){
//DO SOMETHING
}
int ledPin = 7;
int state = HIGH;
void setup(){
//DO SOMETHING
}
void loop(){
//DO SOMETHING
}
Include Guard
- Geen ambiguïteit
- Geen 2 dezelfde includes
- Kan file size verkleinen
#ifndef _TEST_LIB_H_
#define _TEST_LIB_H_
/***************/
/* */
/* YOUR */
/* CODE */
/* HERE */
/* */
/***************/
#endif
Werking Include Guard
mystruct.h
struct myStruct{
int x;
double y;
char z;
};
myproject.ino
#include "mystruct.h"
#include "mystruct.h"
void setup(){
//DO SOMETHING
}
void loop(){
//DO SOMETHING
}
myproject.ino
struct myStruct{
int x;
double y;
char z;
};
// Dubbele declaratie
// Compile Error
struct myStruct{
int x;
double y;
char z;
};
void setup(){
//DO SOMETHING
}
void loop(){
//DO SOMETHING
}
Werking Include Guard
mystruct.h
#ifndef _TEST_LIB_H_
#define _TEST_LIB_H_
struct myStruct{
int x;
double y;
char z;
};
#endif
myproject.ino
#include "mystruct.h"
#include "mystruct.h"
void setup(){
//DO SOMETHING
}
void loop(){
//DO SOMETHING
}
myproject.ino
struct myStruct{
int x;
double y;
char z;
};
// Geen compile error
void setup(){
//DO SOMETHING
}
void loop(){
//DO SOMETHING
}
Conditional Include
- Selectief Include
- Specifieke output afhankelijk van compile opties
- Cross Compatibility
- Code verkleinen
#ifndef _AVR_IO_H_
#define _AVR_IO_H_
#include
#if defined (__AVR_AT94K__)
# include
#elif defined (__AVR_AT43USB320__)
# include
#elif defined (__AVR_AT43USB355__)
#endif
#endif /* _AVR_IO_H_ */
Classes
- Class Definitions
- Class Accces Modifiers
- Class Member Functions
Class Definitions
class Box {
public:
double length; // Length of a box
double breadth; // Breadth of a box
double height; // Height of a box
double getVolume(void);// Returns box volume
};
Class Accces Modifiers
- public
- Members toegankelijk buiten de class
- Geen set/get
- protected
- Members toegangelijk voor child classes
- Overerving niet vaak gebruik op het Arduino platform
- private
- Members alleen toegankelijk voor class members
- Set / Get nodig
- Default optie
class Base {
public:
// public members go here
protected:
// protected members go here
private:
// private members go here
}
Class Members Function
class Box {
public:
double length; // Length of a box
double breadth; // Breadth of a box
double height; // Height of a box
double getVolume(void) {
return length * breadth * height;
}
};
class Box {
public:
double length; // Length of a box
double breadth; // Breadth of a box
double height; // Height of a box
};
double Box::getVolume(void) {
return length * breadth * height;
}
Example
#ifndef Morse_h
#define Morse_h
#include "Arduino.h"
class Morse
{
public:
Morse(int pin);
void dot();
void dash();
private:
int _pin;
};
#endif
Morse::Morse(int pin)
{
pinMode(pin, OUTPUT);
_pin = pin;
}
void Morse::dot()
{
digitalWrite(_pin, HIGH);
delay(250);
digitalWrite(_pin, LOW);
delay(250);
}
void Morse::dash()
{
digitalWrite(_pin, HIGH);
delay(1000);
digitalWrite(_pin, LOW);
delay(250);
}
Eigen library maken
- Quick
- Full
Quick
- In project folder
- Niet meer dan een class declaratie
- myLib.h
- myLib.cpp
- #include "myLib.h"
- Wordt automatisch mee geopend bij project
Project Folder Structuur
labo3_guacamole
├── Guacamole.cpp
├── Guacamole.h
└── labo3_guacamole.ino
Full
- $USER_DIR/Arduino/libraries
- Wat voor het meer dan Quick
- Syntax Highlighting
- Examples
- Toegankelijk voor elk nieuw project
Library Folder Structuur
TestLib
├── examples
│ └── SimpleExample.ino
├── keywords.txt
├── library.properties
└── src
├── TestLib.cpp
└── TestLib.h
Keywords
- Syntax Highlighting in de Arduino IDE
- Reflectie van header file
- KEYWORD1
- Datatypes
- Class Definities
- KEYWORD2
- Methoden
- Functies
- LITERAL1
- Constanten
#######################################
# Syntax Coloring Map SPI
#######################################
#######################################
# Datatypes (KEYWORD1)
#######################################
SPI KEYWORD1
#######################################
# Methods and Functions (KEYWORD2)
#######################################
begin KEYWORD2
end KEYWORD2
transfer KEYWORD2
setBitOrder KEYWORD2
setDataMode KEYWORD2
setClockDivider KEYWORD2
#######################################
# Constants (LITERAL1)
#######################################
SPI_CLOCK_DIV4 LITERAL1
SPI_CLOCK_DIV16 LITERAL1
SPI_CLOCK_DIV64 LITERAL1
SPI_CLOCK_DIV128 LITERAL1
SPI_CLOCK_DIV2 LITERAL1
SPI_CLOCK_DIV8 LITERAL1
SPI_CLOCK_DIV32 LITERAL1
SPI_CLOCK_DIV64 LITERAL1
SPI_MODE0 LITERAL1
SPI_MODE1 LITERAL1
SPI_MODE2 LITERAL1
SPI_MODE3 LITERAL1
Properties File
Metadata voor de Library Manager
name=SPI
version=1.0
author=Arduino
maintainer=Arduino
sentence=Enables the communication with devices that use the Serial Peripheral Interface (SPI) Bus.
paragraph=SPI is a synchronous serial data protocol used by microcontrollers for communicating with one or more peripheral devices quickly over short distances. It uses three lines common to all devices (MISO, MOSI and SCK) and one specific for each device.
category=Communication
url=http://www.arduino.cc/en/Reference/SPI
architectures=avr
Oefening
- Quick Library
- Maak van debug.txt (te vinden op digitap) een quick library
- Gebruik een include guard
- Laat volgend stukje code werken
#ifdef DEBUG
#define DEBUG_INIT() char sDebug[128];
#define DEBUG_PRINTHEX(T, v) Serial.print(T); sprintf(sDebug, "%x\n\r", v); Serial.print(sDebug);
#define DEBUG_PRINTDEC(T, v) Serial.print(T); sprintf(sDebug, "%d\n\r", v); Serial.print(sDebug);
#define DEBUG_HALT() (Serial.available() == 0); Serial.setTimeout(1); Serial.readBytes(sDebug, 1);
#else
#define DEBUG_INIT()
#define DEBUG_PRINTHEX(T, v)
#define DEBUG_PRINTDEC(T, v)
#define DEBUG_HALT()
#endif
#include "debug.h"
void setup() {
Serial.begin(9600);
DEBUG_INIT()
DEBUG_PRINTDEC("De waarde van X is: ", 89)
}
void loop() {
// put your main code here, to run repeatedly:
}
Oefening
- Full Library
- Conveert de Morse Class naar een full library (te vinden op digitap)
- Beschikbaar voor elke project
- Code Highlighting
#define DOT 300
#define DASH 900
class Morse
{
public:
Morse(int pin);
const String MORSE_LUT[26] = { ".-", "-...", "-.-.", "-..", ".", "..-.", "--.", "....", "..", ".---", "_._", ".-..", "--", "-.", "---", ".--.", "--.-", ".-.", "...", "-", "..-", "...-", ".--", "-..-", "-.--", "--.."};
void char_to_morse(char c);
private:
int _pin;
void signal(int duration);
};
Morse::Morse(int pin)
{
pinMode(pin, OUTPUT);
_pin = pin;
}
void Morse::signal(int duration)
{
digitalWrite(_pin, HIGH);
delay(duration);
digitalWrite(_pin, LOW);
delay(duration);
}
void Morse::char_to_morse(char c){
String morse_code = MORSE_LUT[c-'a'];
for (int i = 0; i < morse_code.length(); i++){
if (morse_code[i] == '.') signal(DOT);
else signal(DASH);
}
}
Pointers
Wat is een pointer
Een pointer is een variabele dat een geheugen locatie bevat van andere elementen in de code. Een pointer kan de adressen van volgende elementen bevatten
- Een adres
- Variabelen
- Functies
- Pointers
Geheugen is adresseerbare blok bits!
Wat is een pointer
- Zorgt voor efficiëntere code
- Verhoogt de complexiteit
- Pointers hangen nauw samen met arrays
- Pointer hangt niet vast aan een datatype (void *pointer)
Wat is een pointer
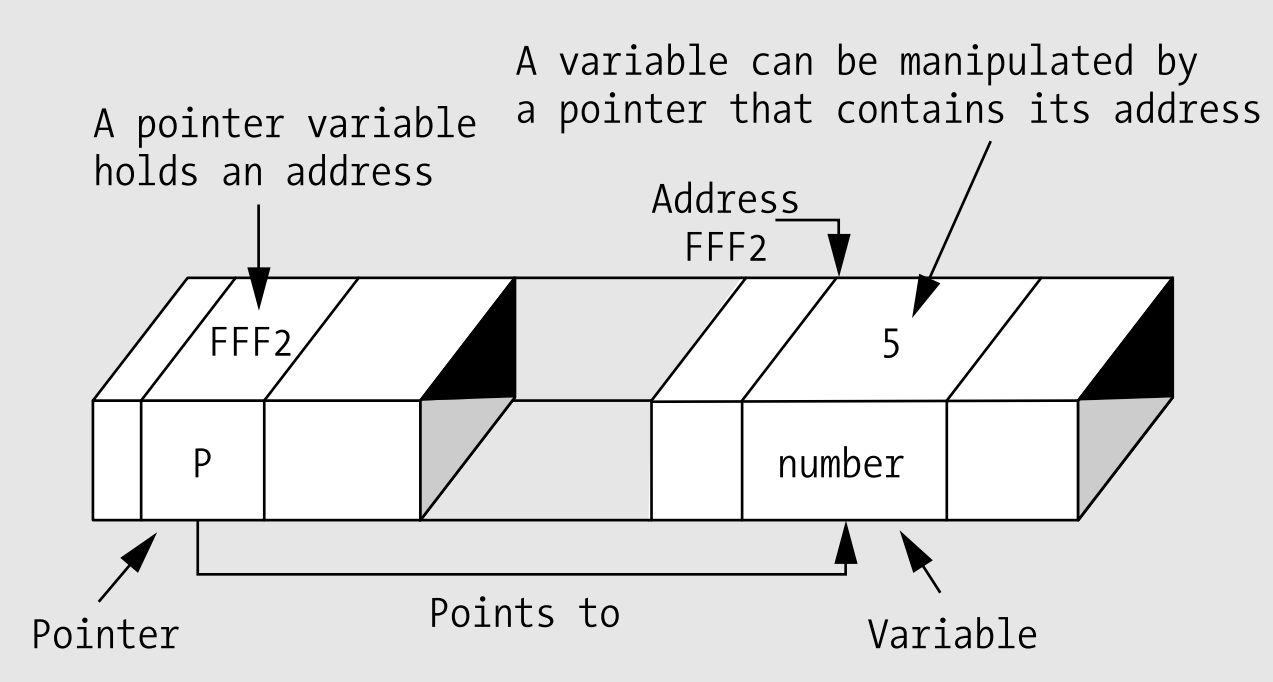
Pointers Declaren
int number = 10;
int *pointer = &number;
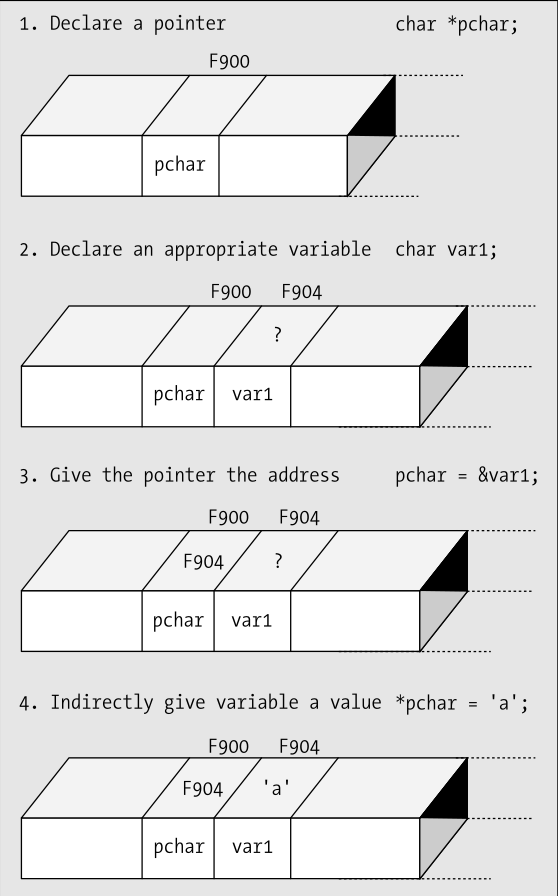
Pointer Operators
- Adres &
- Met & vraag je het adres op van een variable
- Dereferencing *
- Met * vraag je de achterliggende data op, * ook de indirection operator genoemd.
Pointer Voorbeelden
| Declaratie | Value | Adres |
| int Val = 2 | 2 | 54428 |
| int *pVal = &Val | 54428 | 97880 |
| int secVal = *pVal | 2 | 97932 |
| *pVal = 5 | 5 | 54428 |
| pVal = pVal + 1 | 54444 (+16) | 97880 |
Dus ...
- int *p = &c
- De pointer p wijst naar het locatie van c
- int k = *p
- k is gelijk aan de achterliggende data van p
- *p = 0
- De achterliggende data = 0
- *j = *p
- De achterliggende data van j is gelijk aan de achterliggende data van p
Oefening
- Declareer 3 integers x, y en z met de respectievelijke waardes 1, 5, 155
- Declareer 3 pointers p_x, p_y, p_z die verwijzen naar de geheugen locaties van x,y,z
- Print de waardes af van de achterliggende data van de pointers als ook de locaties
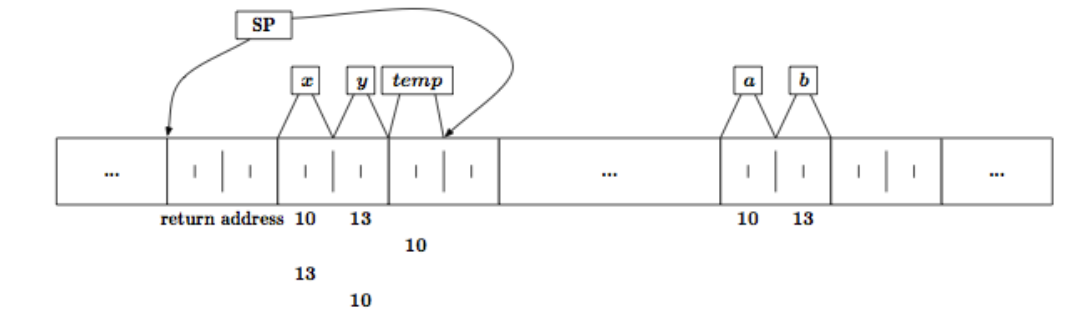
Swap Functie
- Het volgende stuk code swap de variabelen niet
- Er word een lokale kopie gemaakt
- Dit noemt Pass By Value
- De originele data word beschermt
void swap(int x, int y){
int tmp;
tmp = x
x = y;
y = tmp;
}
void main(void){
int a = 10;
int b = 13;
swap (a, b);
}
/*y == ? && z == ?*/
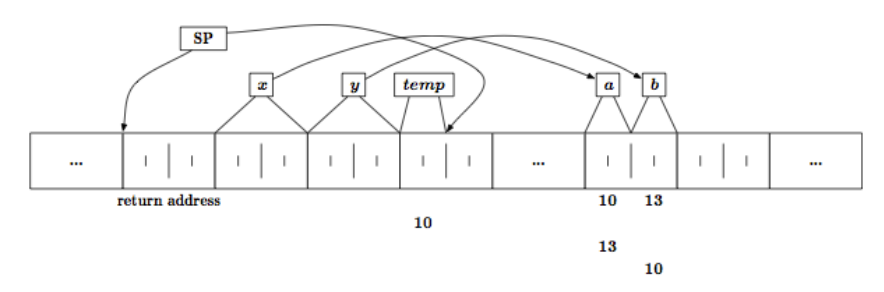
Pass By Reference
- De data wisselt tussen de variabelen
- Toegang tot de variabele is mogelijk door indirecte toegang
- Data moet niet gedupliceerd worden
- Pass By Reference
- Concept bestaat ook in andere programmeer talen
void swap(int *x, int *y){
int tmp;
tmp = *x
*x = *y;
*y = tmp;
}
void main(void){
int a = 10;
int b = 13;
swap (&a, &b);
}
/*y == ? && z == ?*/
Oefening
- Declareer 3 integers x, y en z met de respectievelijke waardes 1, 5, 155
- Schuif vanuit een functie de waarde x naar y, y naar z en z naar x
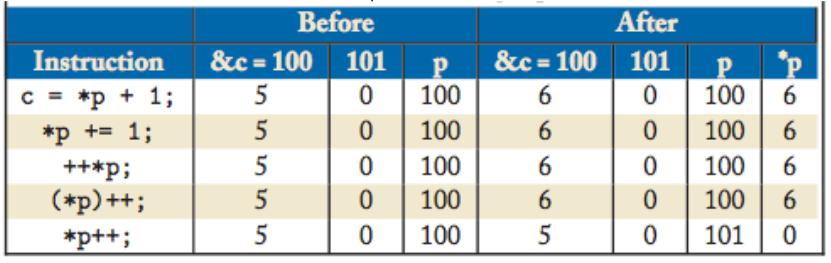
Volgorde van bewerkingen
- * en & hebben voorrang op rekenkundige operators
- *, &, ++ en -- hebben dezelfde priorieit
- * en & worden van rechts naar links geëvalueerd
- *p++ en (*p)++ zijn verschillend
- *p++ verhoogt het adres opgeslagen in p en haalt daarna de achterliggende data van het nieuwe adres op
- (*p)++ verhoogte de achterliggende data op adres p
Volgorde van bewerkingen
Veronderstel dat
- char c = 5
- char *p
- p = &c
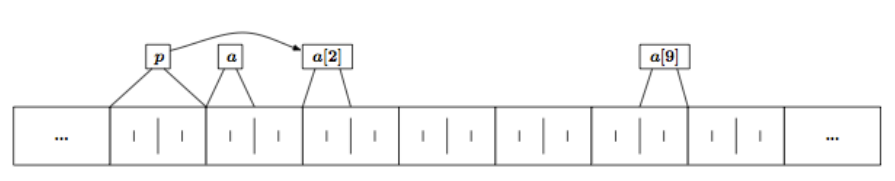
Pointers & Arrays
- Arrays is een blok van dezelfde data types
- Het eerste element van een array kan beschouwd worden als een pointer van hetzelfde type
- Door het adres opgeslagen in de pointer te veranderen kunnen we volgende elementen aanspreken
- Elk array element wordt in opeenvolgende volgorde in het geheugen opgeslagen
int *p
int a[1O]
p = &(a[2]);
/*Dan klopt het volgende*/
*p = a[2];
*(p+ 1) = a[3];
Gevaren van pointers
- Rechtstreekse manipulatie van het geheugen
- Kent geen out of bounds
int a[1O]
int *p = &(a[0]);
int i = a[11] //error
int j = *(p + 15) //mogelijk
Null Terminated C String
- In C worden alle char arrays getermineerd door '\0'
- char *x = "hello" == "hello\0"
- char x[4] = "hello" == "hello\0"
- Dit maakt het mogelijk om simpels char arrays te kunnen manipuleren
int strlen(char *s) /* added by RJH; source: K&R p99 */
{
int n;
for(n = 0; *s != '\0'; s++)
{
n++;
}
return n;
}
Lengte van een object
- Pointer is een adres
- Pointers geven niet altijd een lengte mee
- Functies mbt tot buffers hebben meestal beide nodig
void RF24::read(void *buf, uint8_t len)
bool RF24::write(const void *buf, uint8_t len)
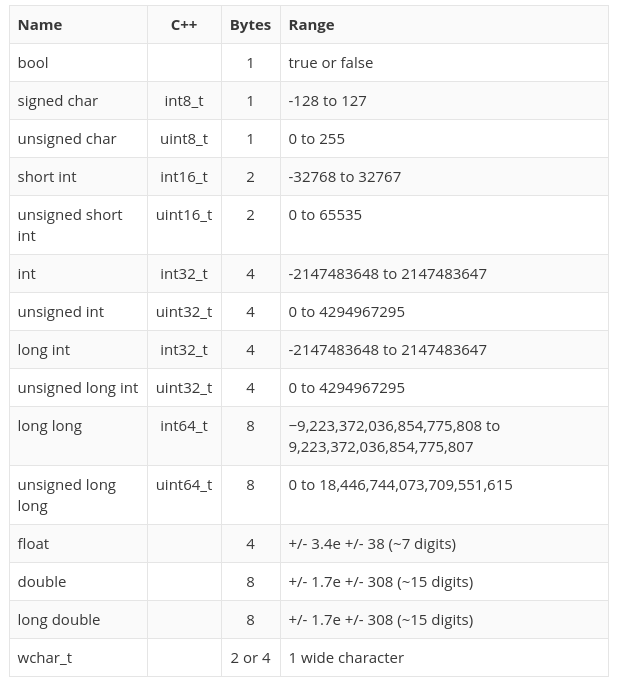
- sizeof returnt de grote in het aantal bytes
- sizeof(int) = 4
char data[10]="Hello World"
for (int i = 0; i < sizeof(data)/sizof(int); i++){
//dosomething
}
char data[10]="Hello World"
write(data, sizeof(data));
Strings
- Op een micrcontroller werkt men niet graag met string maar null terminated arrays
- Kijk zeker hier is: Werken met buffers
#include
void *memcpy (void *dest, const void *src, size_t len)
{
char *d = dest;
const char *s = src;
while (len--)
*d++ = *s++;
return dest;
}
Oefening
Schrijf een functie met pointers waar je een 2 arrays aan elkaar rijgt (concat)Union
A union is a variable that may hold (at different) times objects of different types and sizes, with the compiler keeping track of size and alignment requirements. Unions provide a way to manipulate different kinds of data in a single area of storage.
- acces
- union_name.member
- union-name.member
- Maar een datatype per moment mogelijk
- Alle datatypes gedeclareerd starten op dezelfde geheugen locatie
union my_data {
int value;
char bytes[sizeof(int)];
} this_data;
union my_data other_data
Union Voorbeeld
void setup(){
union {
unsigned short int vals_ints[3];
unsigned char vals_chars[sizeof(unsigned short int)*3+1];
} vals;
vals.vals_ints[0] = 1;
vals.vals_ints[1] = 2;
vals.vals_ints[2] = 0xccAA;
printf("Loc struct: %p\n",(void*) &vals);
printf("Loc 1: %p\n",(void*) &vals.vals_ints[0]);
printf("Loc 2: %p\n",(void*) &vals.vals_ints[1]);
printf("Loc 3:%p\n",(void*) &vals.vals_ints[2]);
printf("Loc Array: %p\n",(void*) &vals.vals_chars);
printf("Val 1: %d\n",vals.vals_ints[0]);
printf("Val 2: %d\n",vals.vals_ints[1]);
printf("Val 3: %d\n",vals.vals_ints[2]);
printf("Byte 1: %u\n",vals.vals_chars[0]); //unsigned short int is 2 bytes lang
printf("Byte 2: %u\n",vals.vals_chars[2]); //daarom 0 2 4 als index
printf("Byte 3: %x\n",vals.vals_chars[4]);
printf("Val array: %d\n",vals.vals_chars);
/*
*Let wel op de endianness, de integer word met litlle endianness opgeslagen
in het geheugen. Dit kan je zien met print van byte 3.
* */
}
void loop(){
}
/* OUTPUT
Loc struct: 0x7ffc295e2bd0
Loc 1: 0x7ffc295e2bd0
Loc 2: 0x7ffc295e2bd2
Loc 3:0x7ffc295e2bd4
Loc Array: 0x7ffc295e2bd0
Val 1: 1
Val 2: 2
Val 3: 52394
Byte 1: 1
Byte 2: 2
Byte 3: aa
Val array: 694037456
Union Gebruik
In het Arduino I2C Master Reader/Slave Writer Voorbeeld
Master Reader
#include <Wire.h>
const int MEMBERS = 3;
const int SIZE = sizeof(unsigned short int) * 3 + 1;
union {
unsigned short int vals_ints[MEMBERS];
unsigned char vals_chars[SIZE];
} vals;
void setup() {
Wire.begin();
Serial.begin(9600);
}
void loop() {
Wire.requestFrom(8,sizeof(unsigned short int)*3+1);
if (Wire.available() == SIZE) {
Wire.readBytes(vals.vals_chars, SIZE);
for (int i = 0; i < MEMBERS; i++) Serial.println(vals.vals_ints[i]);
}
delay(500);
}
Slave Sender
#include
const int MEMBERS = 3;
const int SIZE = sizeof(unsigned short int) * 3 + 1;
union {
unsigned short int vals_ints[MEMBERS];
unsigned char vals_chars[SIZE];
} vals;
vals.vals_ints[0] = 0;
vals.vals_ints[1] = 1;
vals.vals_ints[2] = 2;
void setup() {
Wire.begin(8);
Wire.onRequest(requestEvent);
}
void loop() {
delay(100);
}
void requestEvent() {
Wire.write(vals.vals_chars);
}
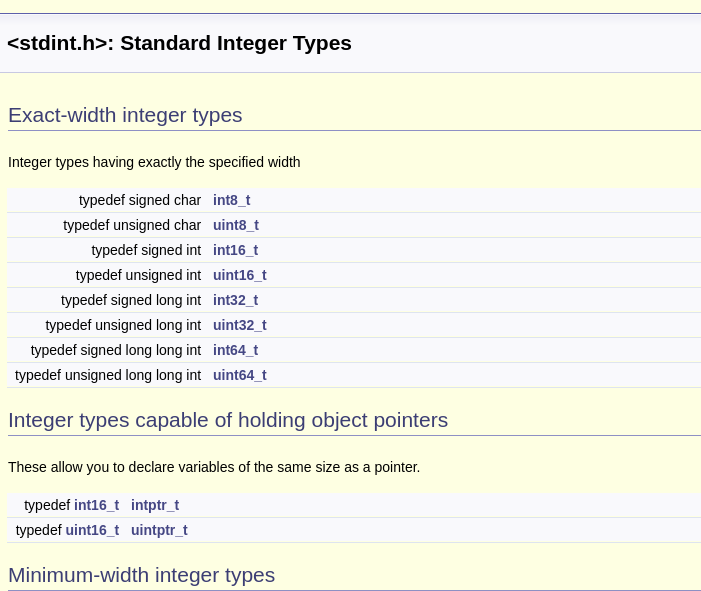
Typedef
- Creeren van nieuwe datatypes
- Makkelijke toegang voor structs, unions
- Creeren van architectuur afhankelijke code
Zonder Typedef
union my_data {
int value;
char bytes[sizeof(int)];
} this_data;
union my_data other_data
Met Typedef
type_def union my_unions {
int value;
char bytes[sizeof(int)];
} my_union;
my_union this_data
my_union other_data