Les 2: IO Operaties
Basis IO Operaties
- pinMode
- DigitalRead
- DigitalWrite
- analogRead
- analogWrite
Programma Structuur
#include "myLib.h"
#define RSTBTN = 3
int POTPIN = A0
int BTNPIN = 5
void setup() {
pinMode(LED_BUILTIN, OUTPUT);
pinMode(POTPIN, INPUT);
pinMode(BTNPIN, INPUT_PULLUP);
void loop() {
//doSomething
}
- Top level
- Libraries
- Variabelen
- Globale scope
- Setup
- Run once
- Loop
- Always Running
PinMode
void setup() {
pinMode(LED_BUILTIN, OUTPUT);
pinMode(POTPIN, INPUT);
pinMode(BTNPIN, INPUT_PULLUP);
void loop() {
//doSomething
}
- Een pin kan 3 states aannemen
- OUTPUT: schrijven naar de pin
- INPUT: lezen van de pin
- INPUT_PULLUP: INPUT + voorgeschakelde weerstand
- Dezelfde functie voor de analoge en digitale pinnen
- Meer info: klik hier
DigitalWrite
void setup() {
pinMode(LED_BUILTIN, OUTPUT);
void loop() {
digitalWrite(LED_BUILTIN, HIGH);
delay(1000);
digitalWrite(LED_BUILTIN, LOW);
delay(1000);
}
- Schrijven van constante waarde
- Hoog (5V)
- Laag (0V)
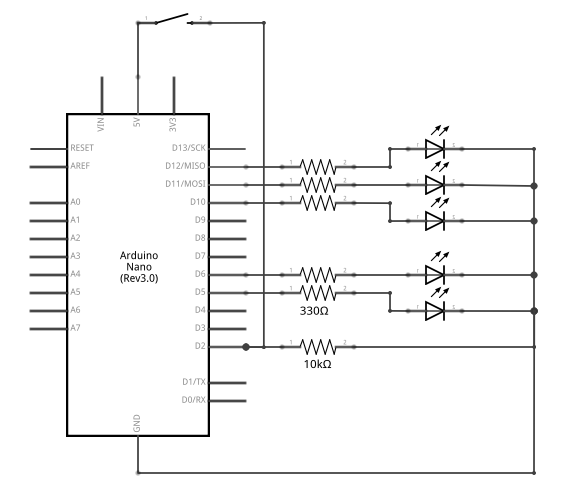
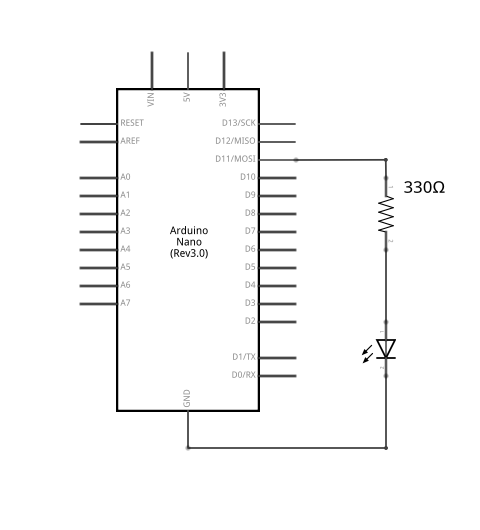
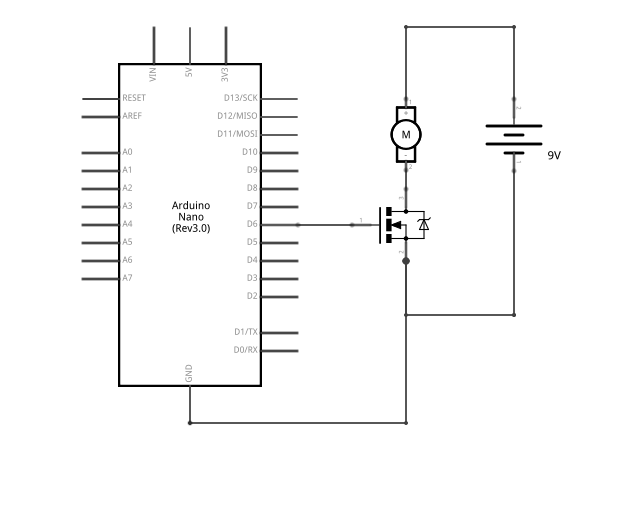
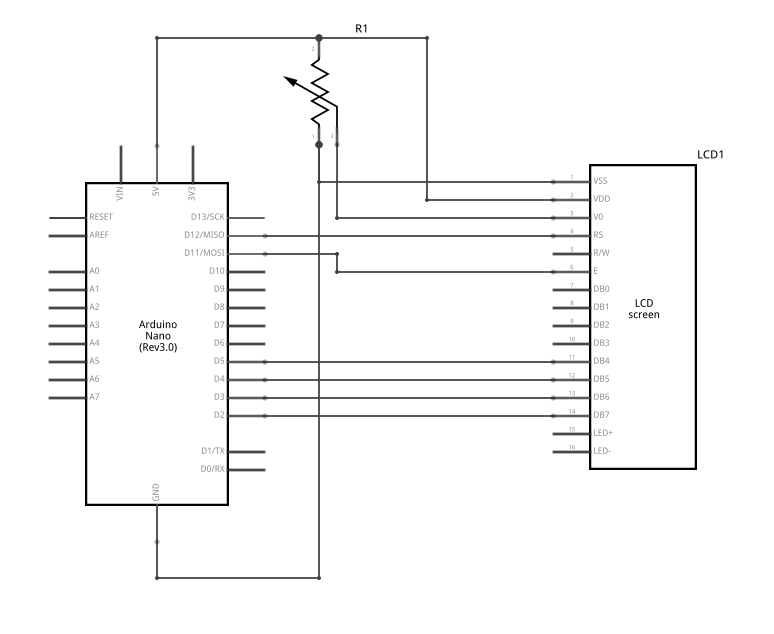
Gebruik van digitalwrite
Aansturen van een led
Mosfet als schakelaar
Aansturen LCD
DigitalRead
void setup() {
pinMode(pushButton, INPUT);
pinMode(LED_BUILTIN, OUTPUT);
}
void loop() {
// read the input pin:
int buttonState = digitalRead(pushButton);
digitalWrite(LED_BUILTIN, buttonState);
}
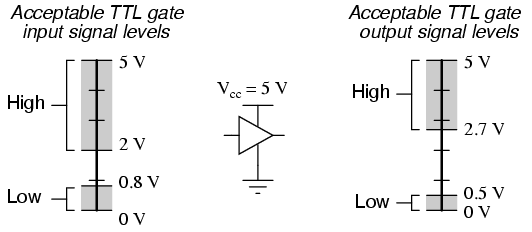
- Uitlezen van een pin
- Specifieke treshold (TLL niveaus) voor de omzetting naar een constante waarde
- High (1)
- Low (0)
Gebruik van digitalread
Uitlezen van een button
AnalogWrite
void setup() {
pinMode(ledPin, OUTPUT);
}
void loop() {
for (int fadeValue = 0 ; fadeValue <= 255; fadeValue += 5) {
analogWrite(ledPin, fadeValue);
delay(30);
}
for (int fadeValue = 255 ; fadeValue >= 0; fadeValue -= 5) {
analogWrite(ledPin, fadeValue);
delay(30);
}
}
- Schrijven van een voltage naar een pin
- max 255 - 5V
- min 0 - 0V
- PWM
- Meer info: klik hier
Gebruik van analogwrite
Aansturen van een led
Mosfet als schakelaar
AnalogRead
void setup() {
Serial.begin(9600);
}
void loop() {
int sensorValue = analogRead(A0);
Serial.println(sensorValue);
delay(1);
}
- Uitlezen van een voltage signaal
- max 1023 - 5V
- min 0 - 0V
- PWM
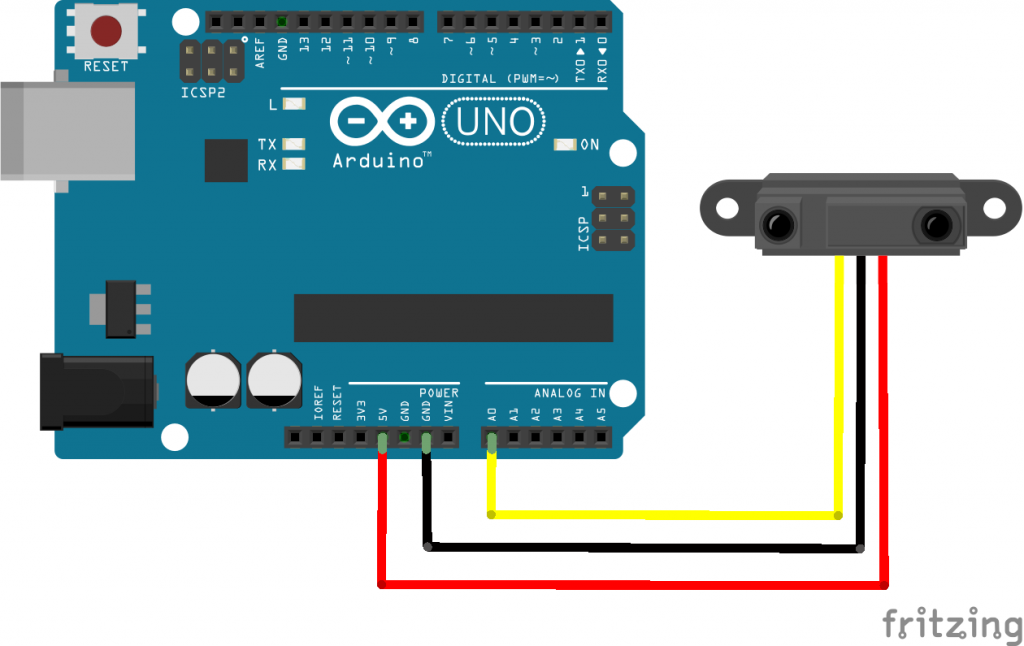
Gebruik van analogread
Uitlezen van potentiometer
Uitlezen van IR Sensor
Analogread met AnalogWrite Combineren
int potPin = A0
int ledPin = 6
void setup() {
Serial.begin(9600);
}
void loop() {
int sensorValue = map(analogRead(potPin), 0, 1024, 0, 255);
Serial.println(sensorValue);
digitalWrite(ledPin,sensorValue)
delay(500);
}
Analog vs Digital
- Digital = True or False
- Analog = een waarde tussen 0 of 5
- Analog vs Digital is een concept van Arduino
- De ATmega bezit alleen een ADC geen DAC
Verdergaan met Digitale Operaties
- Hoog signaal (5V)
- Laag signaal (0V)
- TTL levels
- Richting
- Output (Currrent Sourcen)
- Input (Current Sinken)
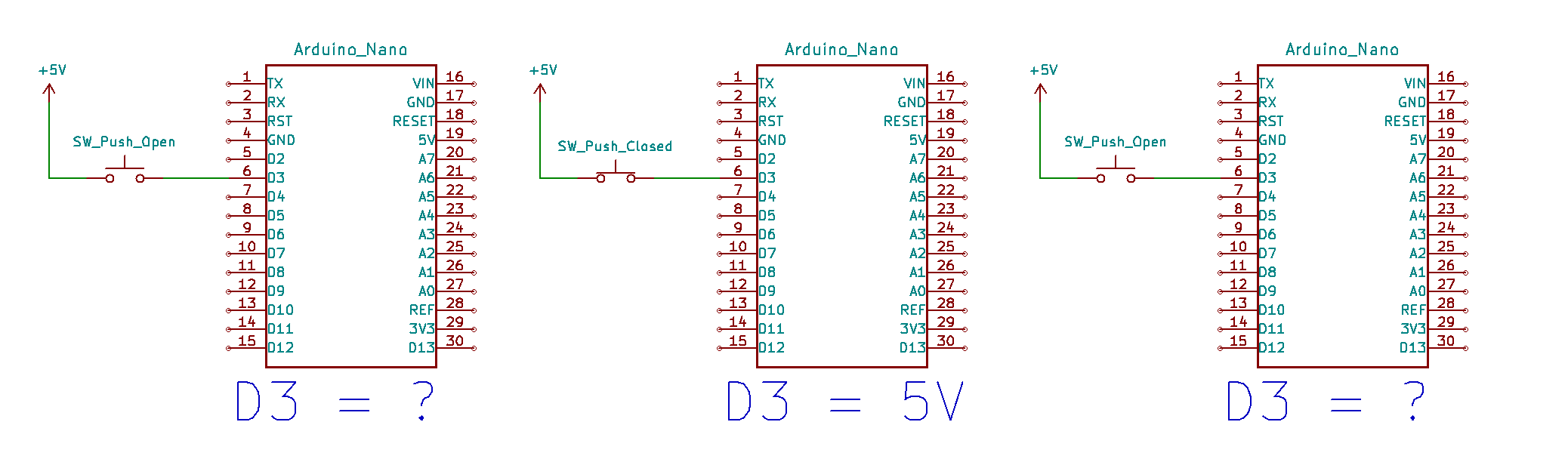
Hoeveel waarden kan een digitale input aannemen?
3
High (5V)
Low (0V)
Floating (?)
Hoe komt dit?
Ruis op het systeem
Capacitieve koppeling
Oplossing
Intern
Extern
Hoe kom dit?
Hoe kom dit?
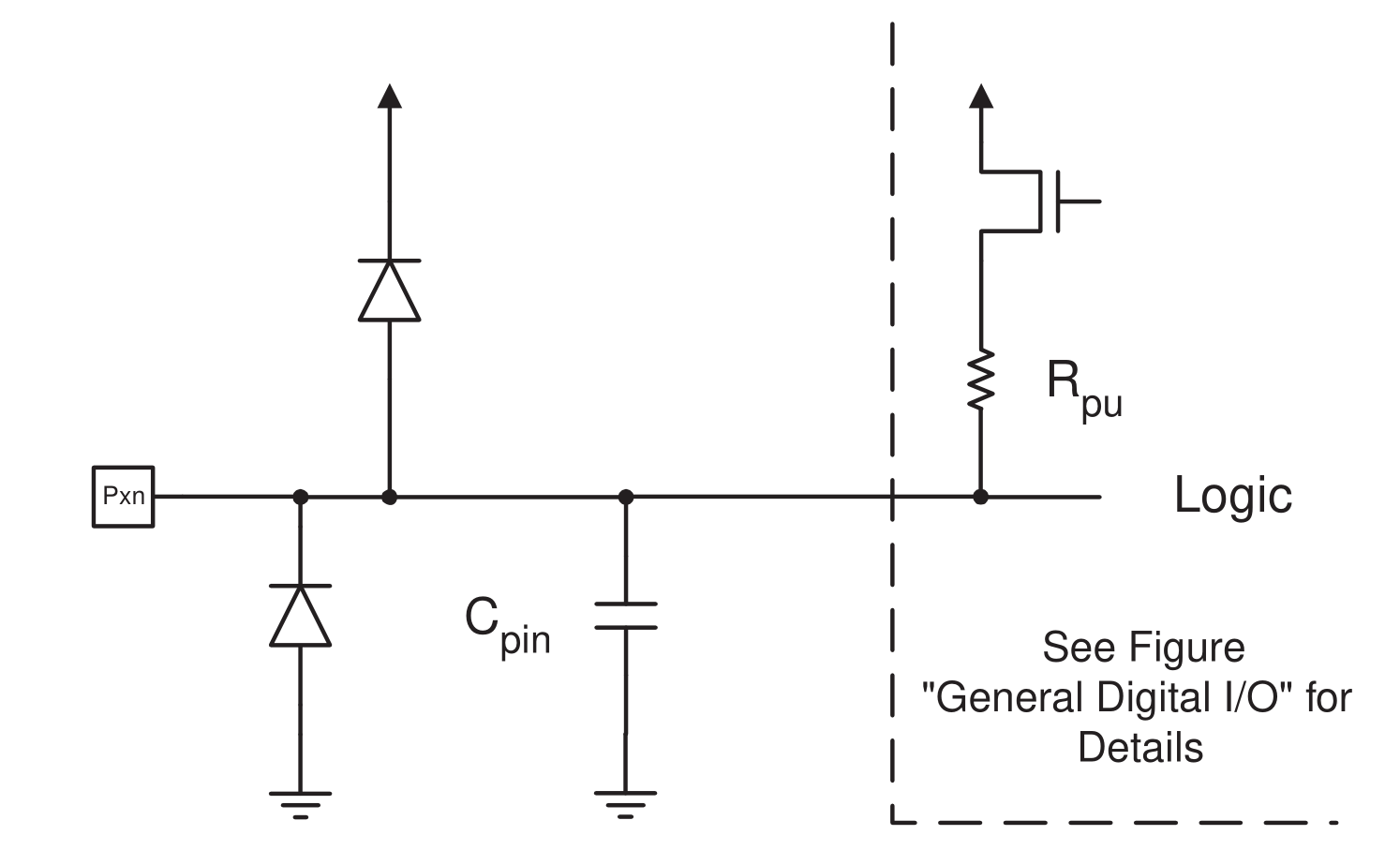
Generiek Diagram GPIO (Niet simpel een draadje aansluiten)
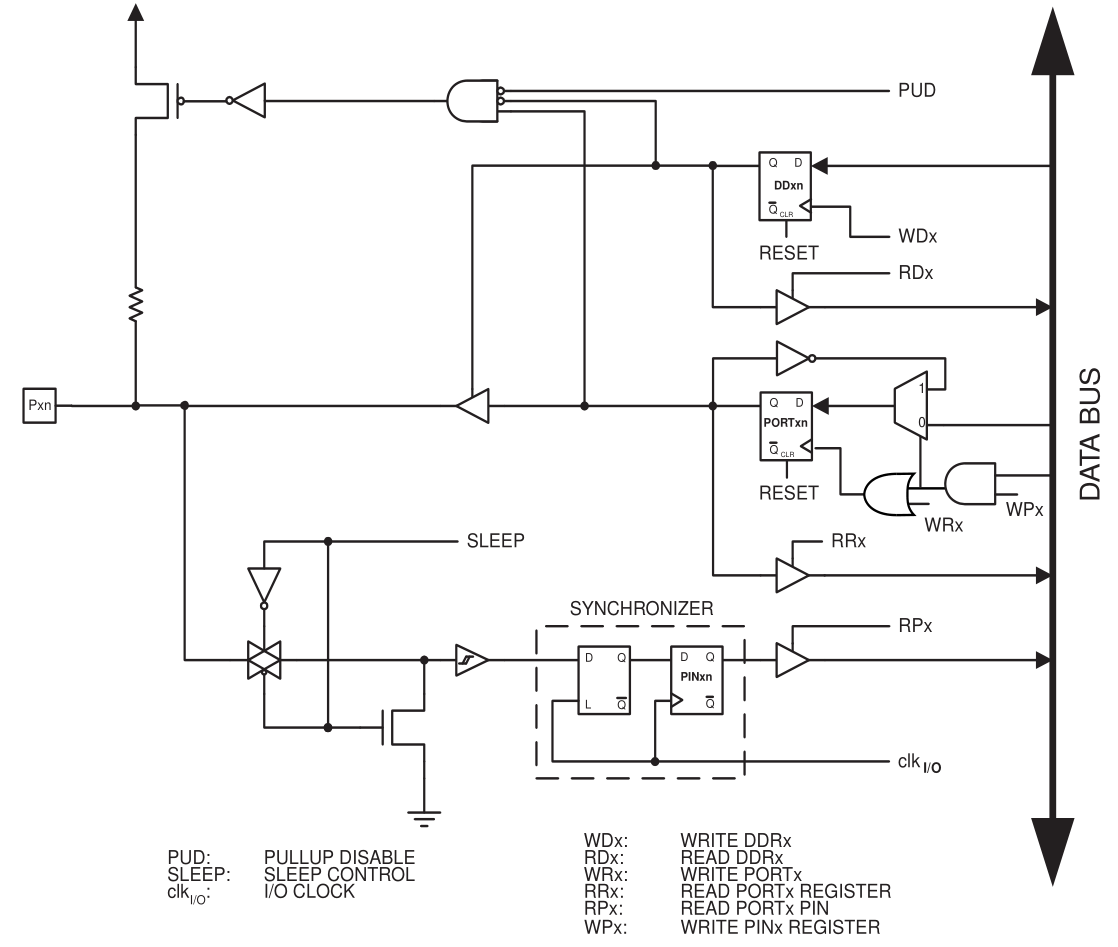
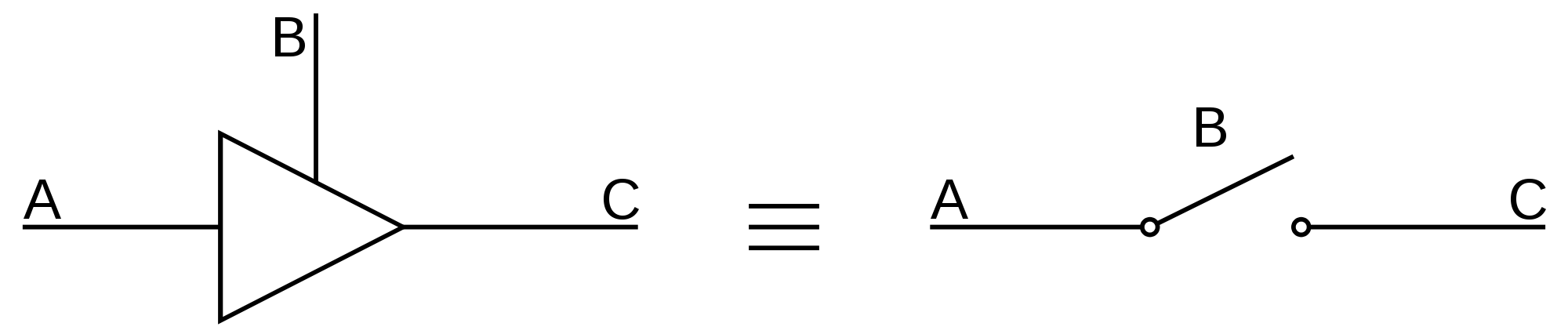
Tri State Logica
| A | B | C |
| 0 | 1 | 0 |
| 1 | 1 | 1 |
| X | 0 | Z |
- pinMode = INPUT
- Pin is dan hoog impedant
- Pin kan dan zweven(Waardes zijn random)
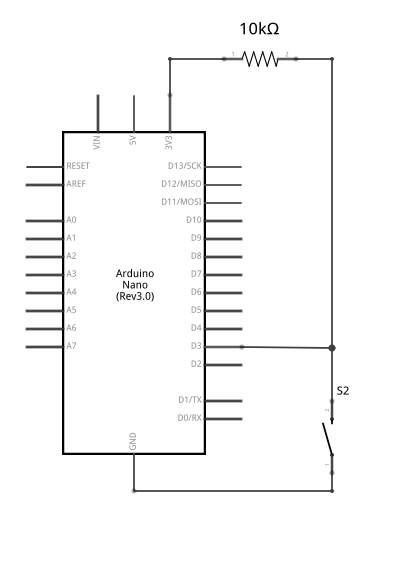
Floating Pin Waardes Vermijden
- Extern
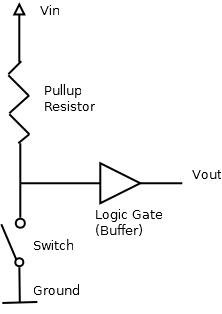
- Pull Up Weerstand
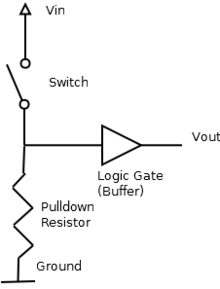
- Pull Down Weerstand
- Intern
- Pull Up Weerstand
Extern
- Pull Up:
- constant HIGH signaal
- constant stroom verbruik
- Pull Down:
- constant LOW signaal
- geen stroom verbruik
- Keuze afhankelijk van je input
- Voor een simpele push button kan beide
Pull Up Resistor
Pull Down Resistor
Weerstand keuze
- Input = Current Sinken
- Stroom wordt in de MCU gestuurd
- Geen weerstand = Problemen
- Max Sink Current / Pin = 20mA
- Veilige keuze weerstand: 10kΩ
- R = U/I => I=U/R => 5V/10kΩ=0.5mA
Intern
- Interne Pull Up weerstand
- Waarde 20kΩ - 50kΩ
- Goed genoeg voor een pushbutton
void setup()
{
pinMode(pinNumber, INPUT_PULLUP);
};
Digitale Output
- Geen Tri State logica
- High of Low signaal
- Output = Current Sourcen
- max Current = 40mA
- max Current alle IOs = 200mA
- Stuur je iets aan, minimale hoeveelheid stroom aanleveren
Verder gaan met Analoge Operaties
- Digitaal / Analoge Conversie
- Analoge Comperator
- Analoog / Digitale Conversie
Er zijn verschillende analoge operaties maar voor de moment is alleen ADC operatie belangrijk.
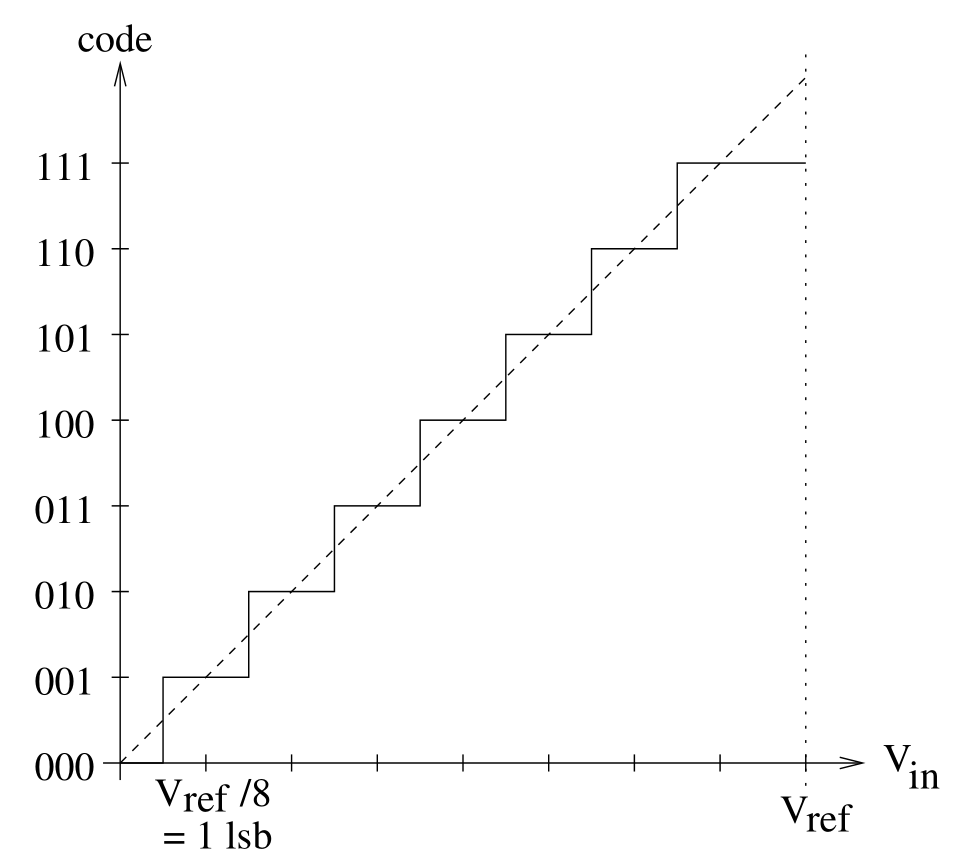
Analoge Digitale Conversie (ADC)
- AnalogRead is een A/D conversie
- Eigenschappen ADC
- Resolutie
- `2^(#Bits ADC)`
- `1024`
- Range
- `0 - 2^(#Bits ADC -1)`
- `0 - 1023`
- Accuracy
- `V_(ref) / (Resolutie)`
- `(5V) / 1024 ≈ 4,9mV`
- `analogRead = (V_(IN) * Resolutie)/V_(ref)`
Oefening ADC
Los op voor een 12bits ADC
Geef de volgende eigenschappen
- Resolutie
- Range
- Accuracy
- Wat is de return waarde van analogRead als we een voltage uitlezen van 1.36v met een referentie voltage van 3,3v?
analogWrite is een oplichter
analogWrite is an analog result with digital means
analogWrite genereert een blokgolf waarbij we de dutycycle manipuleren
Pulse Width Modulation
- Duty Cycle aanpassen - Pulse Width Modulation (PWM)
- Het aanroepen van de analogwrite functie genereert een blokgolf van 500Hz
- De eerste parameter van analogwrite bepaalt de pin
- De tweede parameter van analogwrite bepaalt de dutycycle
- Analogwrite slaagt per pin de tweede parameter op in één geheugen locatie
- Wat is dan de maximale waarde voor de PWM configuratie?
- 255
- 8bit Microcontroller
- Wat is dan maximale nauwkeurigheid voor de dutycycle
- 100%/255 = 0.39%
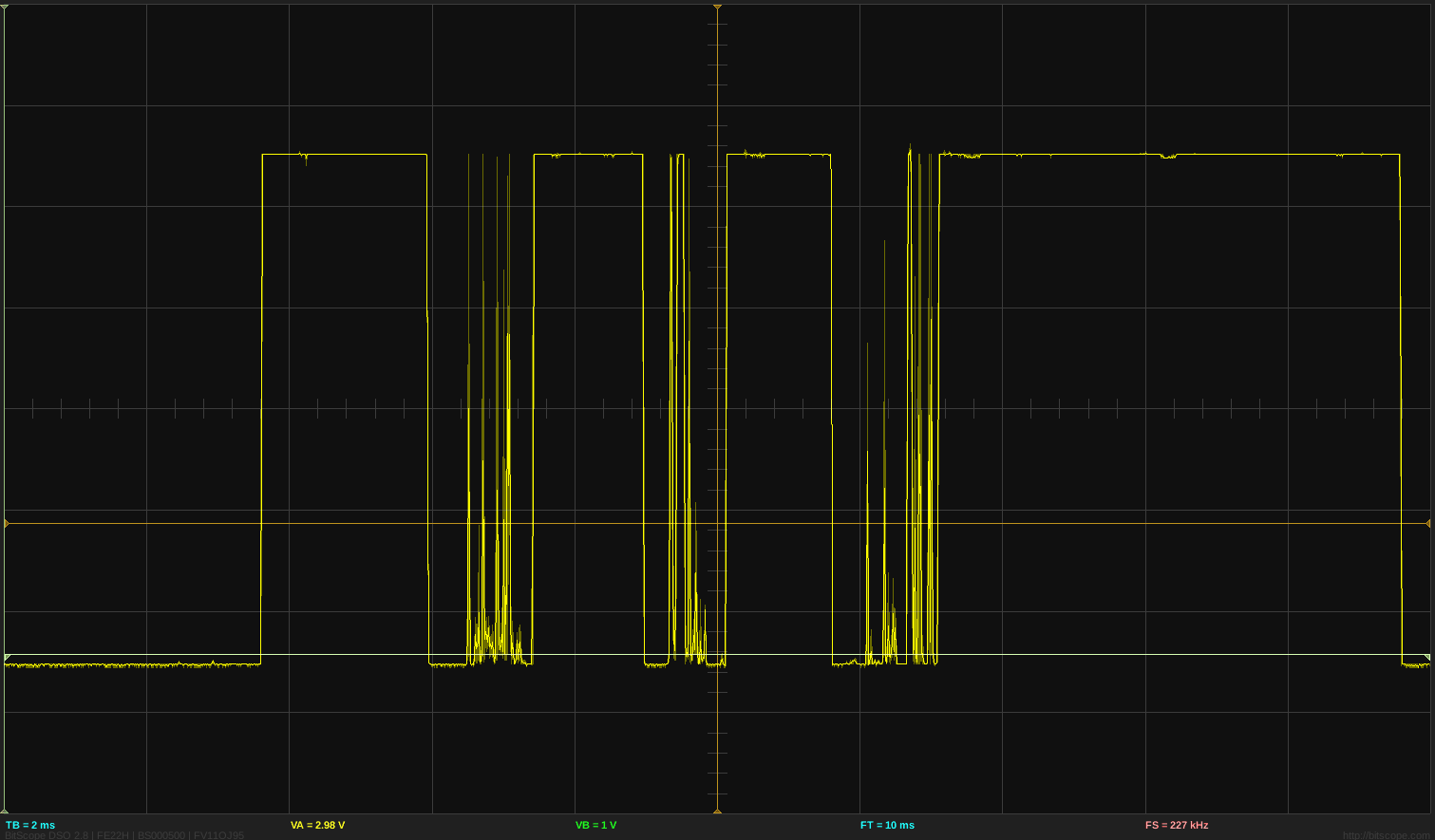
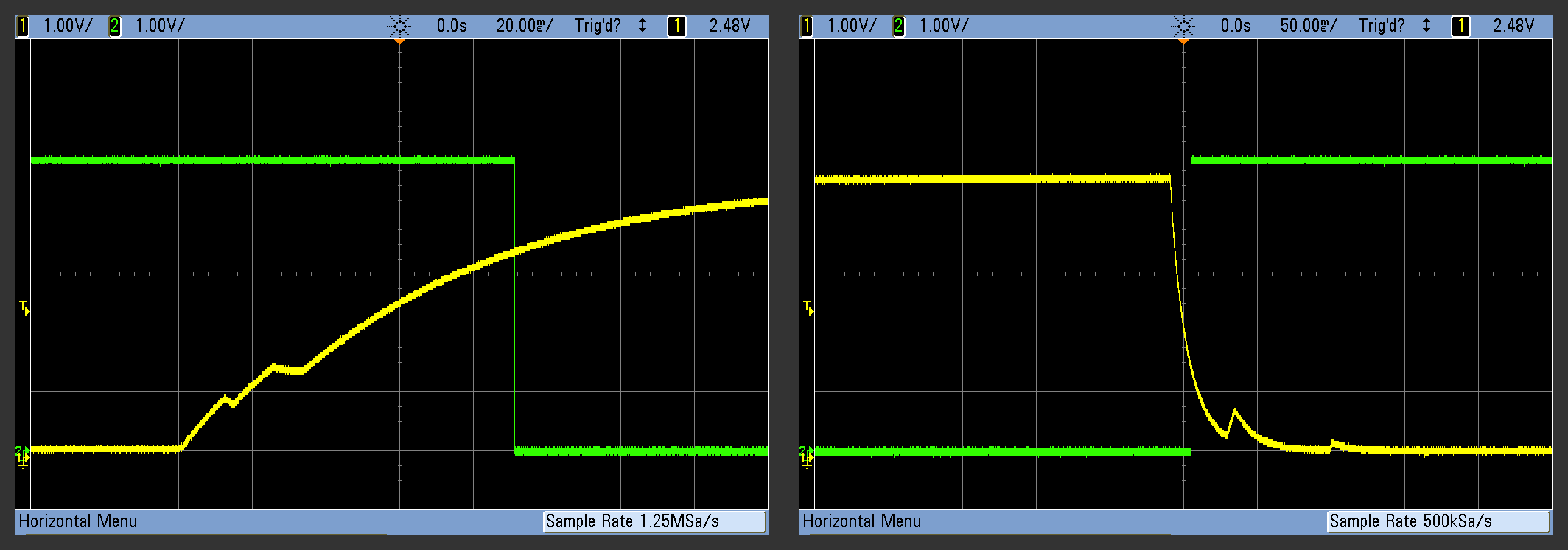
PWM Meten
Scope vs Multimeter
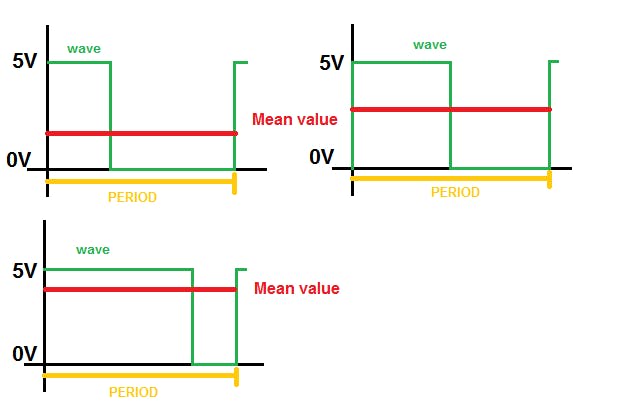
Groen - Scope
Rood - Multimeter
PWM Voorbeeld - Fading
int ledPin = 9; // LED connected to digital pin 9
void setup() {
}
void loop() {
for (int fadeValue = 0 ; fadeValue <= 255; fadeValue += 5) {
analogWrite(ledPin, fadeValue);
delay(30);
}
for (int fadeValue = 255 ; fadeValue >= 0; fadeValue -= 5) {
analogWrite(ledPin, fadeValue);
delay(30);
}
}
Timers
- Arduino claimt de timers van de mcu
- Arduino biedt geen directe acces aan de timers van de mcu
- Arduino exposed de timers dmv:
- delay()
- delayMicros()
- millis()
- micros()
- Blocking vs Non - Blocking
Delay
- delay(int ms)
- Pause;
- milliseconden
- Blocking
- Referentie
- delayMicros(int µs)
- ≈ delay()
- microseconden Referentie
Millis
- millis()
- Tijd sinds het opstarten van de mcu
- Return de tijd in milliseconden
- Overflow na 50 dagen
- Referentie
- micros()
- ≈ millis()
- Tijd sinds het opstarten van de mcu
- Return de tijd in microseconden
- Referentie
Blocking vs Non - Blocking
Blocking
const int ledPin = 13;
int ledState = LOW;
const long interval = 1000;
void setup() {
pinMode(ledPin, OUTPUT);
}
void loop() {
delay(interval)
ledstate = !ledstate
digitalWrite(ledPin, ledState);
}
Non - Blocking
const int ledPin = 13;
int ledState = LOW;
long previousMillis = 0;
const long interval = 1000;
void setup() {
pinMode(ledPin, OUTPUT);
}
void loop() {
unsigned long currentMillis = millis();
if (currentMillis > interval + previousMillis ) {
previousMillis = currentMillis;
ledstate = !ledstate
digitalWrite(ledPin, ledState);
}
}
Interrupts
- Reactie op een event
- Non - Blocking
- Interrupt Types
- Hardware
- Software (Vereist OS)
- Interrupt bron
- Extern
- Meestal verandering op een pin
- Pin State Change
- Seriële communicatie
- Intern
- A/D Conversie voltooid
- Timer afgelopen
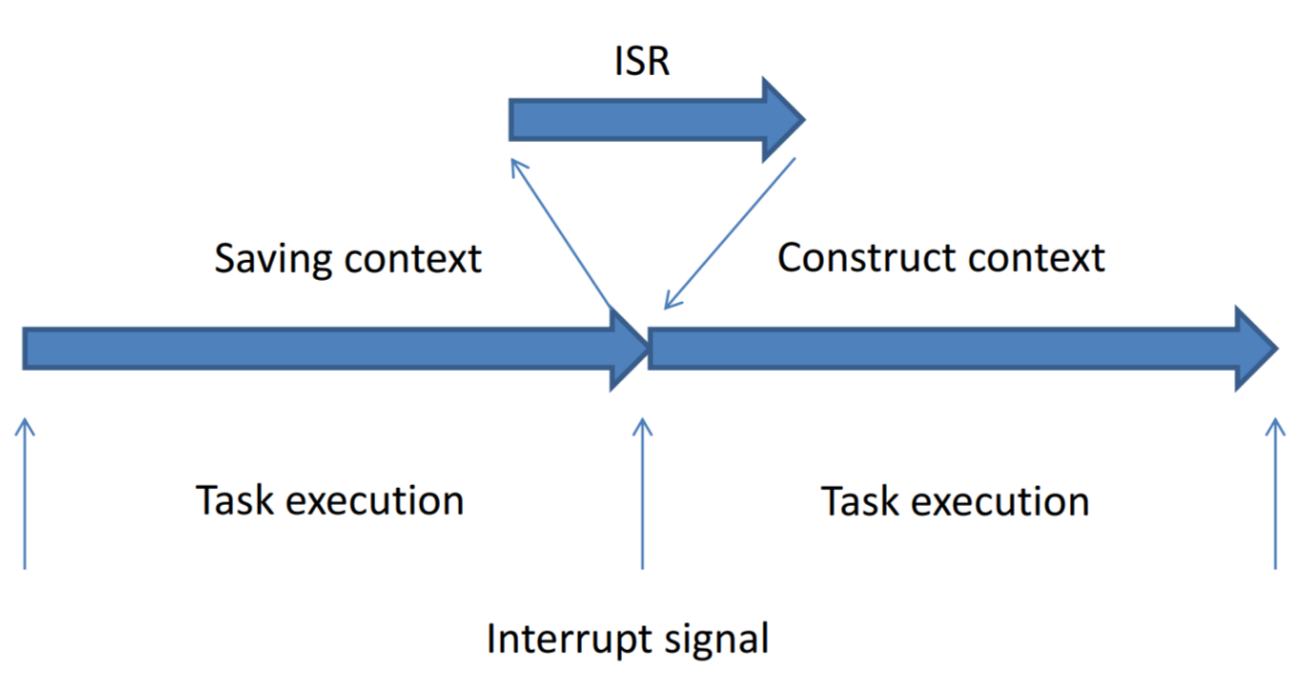
Interrupts
- Onderbreking huidig processor activiteit
- Interne of Externe trigger
- Interrupt Service Routine(ISR)
- Na trigger springt de code naar de ISR
- ISR een koppeling van event naar een functie
- Na de ISR springt de code terug
Interrupts
Wat is de tegenpool van interrupts?
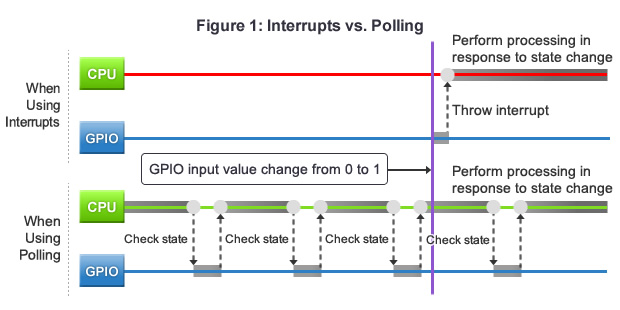
Polling vs. Interrupts
| Polling | Interrupts |
| Synchroon | Asynchroon |
| Niet dringend | Dringend |
| Frequent | Sporadisch |
Polling vs Interrupts
Interrupts & Arduino
- Interrupts zitten verwerkt in de beschikbare libraries
- Meest toegankelijke: External Interrupts
- Interrupts gebaseerd op Inputs
- Pin specifiek
- Instellen van van een External Interrupt
- Interrupt Service Routine(ISR)
- Good Pratices
- delay() werkt niet in een ISR
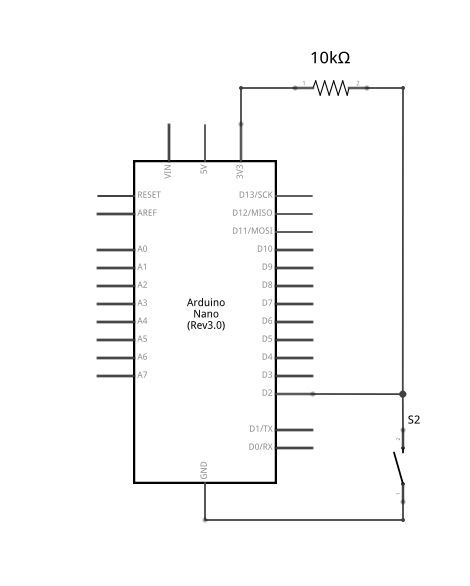
Interrupts & Arduino: Pins
| Board | Digital Pins Usable For Interrupts |
| Uno, Nano, Mini, other 328-based | 2, 3 |
| Mega, Mega2560, MegaADK | 2, 3, 18, 19, 20, 21 |
| Micro, Leonardo, other 32u4-based | 0, 1, 2, 3, 7 |
| Zero | all digital pins, except 4 |
| MKR1000 | 0, 1, 4, 5, 6, 7, 8, 9, A1, A2 |
| Due | all digital pins |
| 101 | all digital pins |
Instellen van van een External Interrupt
interrupts()
//Staat standaard aan
//Gebruikt na het uitzetten van interrupts
noInterrupts()
//Uitzetten van interrupts
//Kan nodig zijn bij tijd cruciale acties
attachInterrupt(digitalPinToInterrupt(pin), ISR, mode)
//digitalPinToInterrupt(pin) - mappen van Arduino Pin naar ATmega328p
//ISR - Naam van de functie die wordt aangeroepen als de interrupt optreedt.
//mode - Het soort event waarop de interrupt gaat triggeren
//mode - LOW, CHANGE, RISING, FALLING
detachInterrupt(digitalPinToInterrupt(pin));
//ontkoppelen van de interrupt
Volatile Keyword
volatile int ButtonState = 0;
- Actie voor de compiler
- Plaats de variable in het ram geheugen ipv een register
- Nodig als je een variable aanpast in een interrupt
Voorbeeld interrupts
volatile int state = 0;
void ext_int_callback(){
state != state
};
void setup() {
Serial.begin(9600);
pinMode(LED_BUILTIN, OUTPUT);
attachInterrupt(digitalPinToInterrupt(2), ext_int_callback, FAILING);
}
void loop() {
digitalWrite(LED_BUILTIN, state);
}
ISR: Best Practices
- Hou de ISR zo kort mogelijk
- Gebruik flags
- Zet een variabel in de ISR
- Bepaal de volgende actie gebaseerd op die variabele in de main loop
volatile int state = 0;
void ext_int_callback(){
state != state
};
void setup() {
Serial.begin(9600);
pinMode(LED_BUILTIN, OUTPUT);
attachInterrupt(digitalPinToInterrupt(2), ext_int_callback, FAILING);
}
void loop() {
digitalWrite(LED_BUILTIN, state);
}
ISR: Best Practices
- Maak gebruik van state machines
- Defineer een state
- vermijd if/else als beslissingsstructuur groter is dan twee mogelijkheden
- Voorkeur gaat naar flags
- Soms moet de ISR een actie direct uitvoeren voor tijdwinst
const int PERIOD_10ms = 0x01
const int PERIOD_14ms = 0x02
const int PERIOD_19ms = 0x03
volatile int state = 0;
void ext_int_callback(){
switch(state)
{
case PERIOD_10ms:
{
// Toggle pin;
// Timer Stop;
// Change period to 14ms;
// Timer Start;
break;
}
case PERIOD_14ms:
{
// Toggle pin;
// Timer Stop;
// Change period to 19ms;
// Timer Start;
break;
}
case PERIOD_19ms:
{
// Toggle pin;
// Timer Stop;
// Change period to 10ms;
// Timer Start;
break;
}
default:
{
/* Timer_ISR entered undefined state */
// Make default period 10ms
break;
}
}
};
void setup() {
Serial.begin(9600);
pinMode(LED_BUILTIN, OUTPUT);
attachInterrupt(digitalPinToInterrupt(2), ext_int_callback, FAILING);
}
void loop() {
digitalWrite(LED_BUILTIN, state);
}
ISR: Best Practices
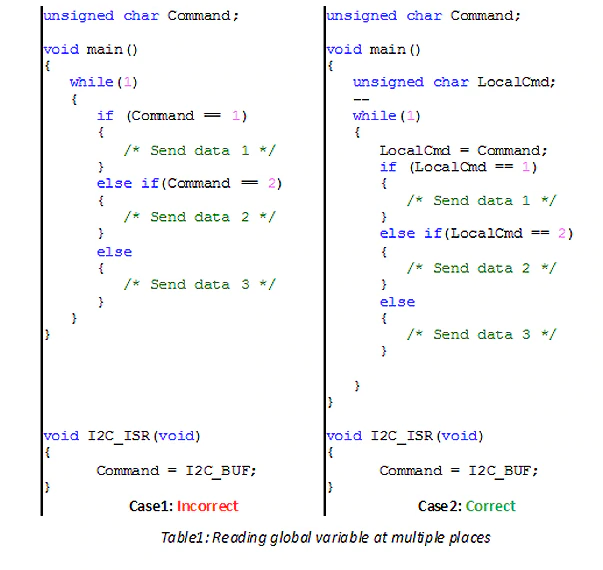
Global variables – Know when it’s modified
Global variables need to be carefully handled while used with ISRs, because interrupts are generally asynchronous and if a global variable is being written into by an ISR, it can get modified at any time. We need to be careful of the following aspects:
Reading/Writing Global Variables at multiple places
Global variables should be modified at only a few necessary places inside a program. If a global variable is being modified by multiple threads (i.e., the main process, ISRs, and other hardware functions like DMA inside an MCU), there is a chance of the variable getting corrupted.
Reading a global variable at multiple instances
inside a main process is as worrisome as its modification in different threads. Consider the following
Debouncing a Button
Het probleem?
Oplossing
- Hardware
- Sequentiële Logica
- RC Circuit
- Software
Startpunt
Voor zowel de hard -en software vertrekken we van een ...
Pull Up Resistor
Pull Down Resistor
Hardware: Sequentiële Logica
NAND Poort Oplossing
NOR Poort Oplossing
Bulky oplossing krijgt geen voorkeur
Hardware: RC Debouncer
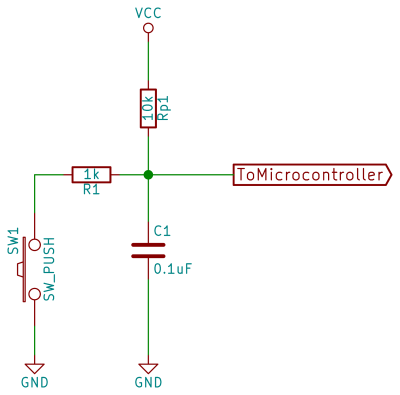
RC Debounce
Wat gaat er gebeuren met het ingangssignaal?
RC Charging Circuit
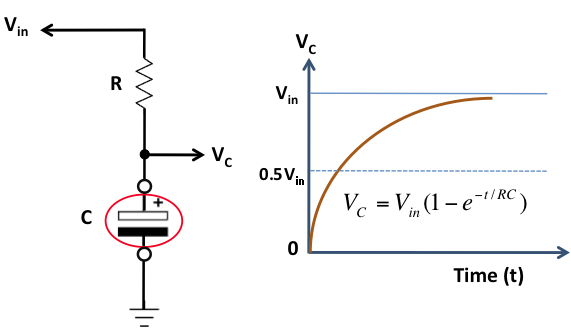
RC Charging Circuit
- Tijd nodig om te laden
- Tijd nodig om te ontladen
- Ongevoelig voor snelle veranderingen
- Filtert de bounce weg
- Hardwarematige delay
RC Charging Circuit
- `tau -= R * C`
- Eenheid τ seconden
- `V_(C) = V_(S)*(1 - e^(-t/(RC)))`
- `V_(C)` Uitgangspanning condensator
- `V_(PIN)`
- `V_(S)` Ingangsspanning condensator
- `V_(C C)`
- 5V indien het een pulldown / up weerstand die gevoed is door de Arduino
- Arduino TTL Levels
- Logische Hoog vanaf 2,0V
| Time Constant | RC Value | `% V_(S)`` |
| `0 tau` | `0*RC` | `0 %` |
| `0.7 tau` | `0.7*RC` | `50 %` |
| `5 tau` | `5*RC` | `100 %` |
Een goede delay?
Een delay tussen de 20 - 50 ms is een goede keuzeSelecteren van een goede condensator waarde
- Rekening houden met TTL niveaus
Alle signaal problemen opgelost?
Zo goed als
Hysteris
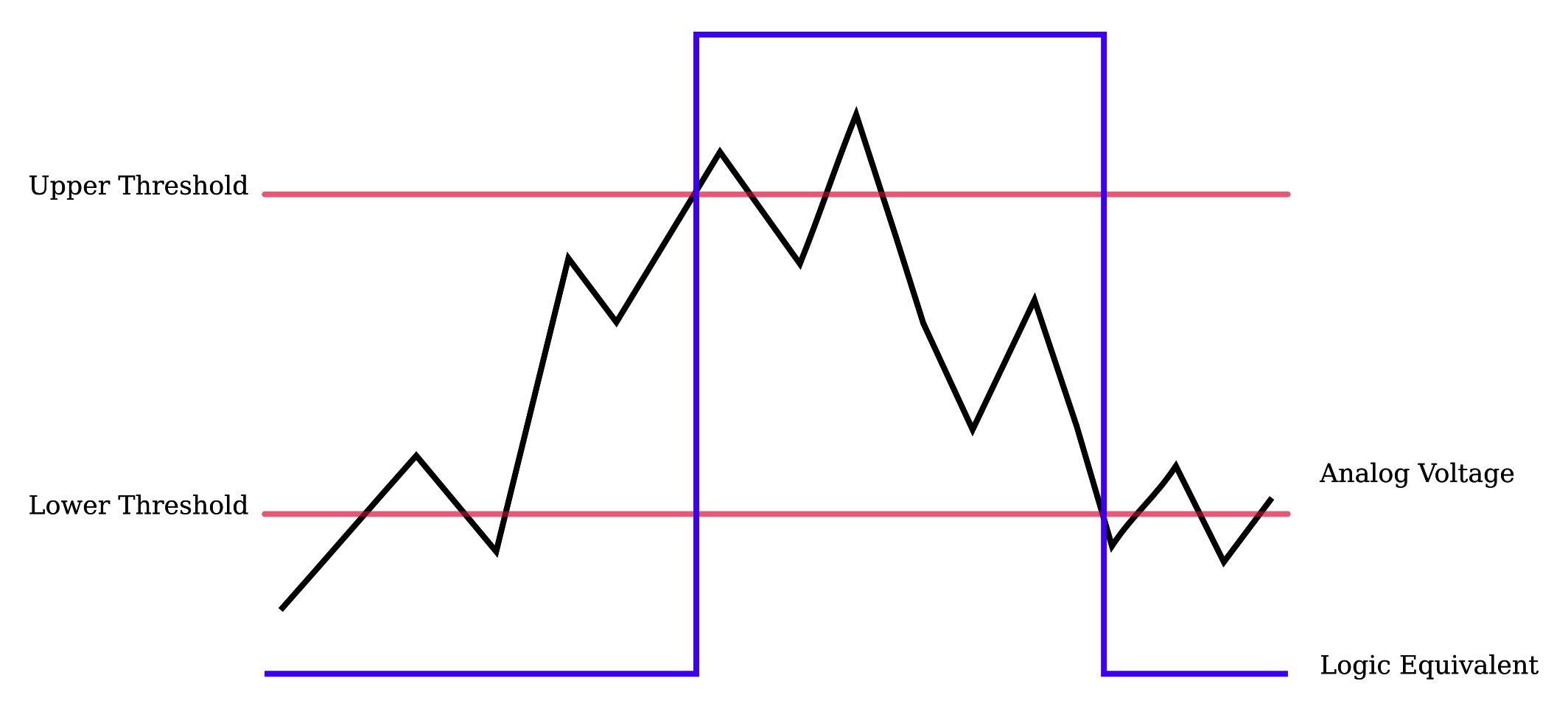
Oplossing:Inverting Schmitt Trigger
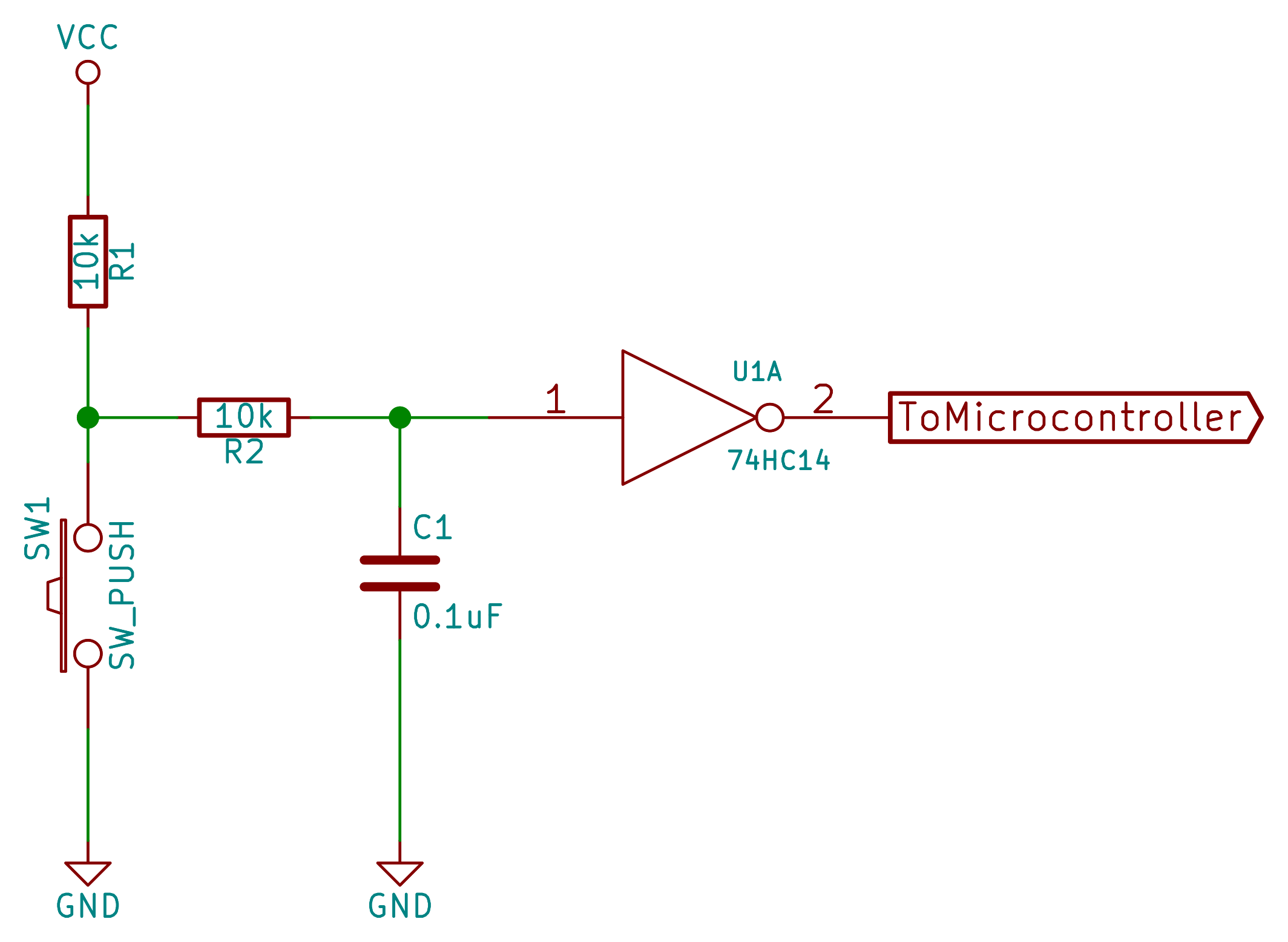
Oplossing:Inverting Schmitt Trigger
Waarom de extra stap?
Met gebruik veranderen de mechanische eigenschappen van een knop
Software Oplossing
- Basic (Blocking)
- Arduino Example(Non - Blocking)
Basic
const int buttonPin = 2;
int buttonState;
int lastButtonState = LOW;
long debounceDelay = 50;
void setup() {
pinMode(buttonPin, INPUT);
}
void loop() {
int reading = digitalRead(buttonPin);
if (reading != lastButtonState) {
delay(debounceDelay)
lastButtonState = reading;
}
}
Arduino Debounce Example: Variables
const int buttonPin = 2;
const int ledPin = 13;
int ledState = HIGH;
int buttonState;
int lastButtonState = LOW;
long lastDebounceTime = 0;
long debounceDelay = 50;
Arduino Debounce Example: Setup
void setup() {
pinMode(buttonPin, INPUT);
pinMode(ledPin, OUTPUT);
digitalWrite(ledPin, ledState);
}
Arduino Debounce Example: Loop
void loop() {
int reading = digitalRead(buttonPin);
if (reading != lastButtonState) {
lastDebounceTime = millis();
}
if ((millis() - lastDebounceTime) > debounceDelay) {
if (reading != buttonState) {
buttonState = reading;
if (buttonState == HIGH) {
ledState = !ledState;
}
}
}
digitalWrite(ledPin, ledState);
lastButtonState = reading;
}
Oefening: Whack - a - Mole
- Laat de leds afwisselend branden
- De leds branden sequentieel afzonderlijk.
- De snelheid van de sequentie is aanpasbaar.
- Een button simuleert de hamer van Whack-a-Mole.
- Als led #3 brand moet je met de hamer slaan
- De button is interrupt gestuurd
- Er is een uitbreiding voor het spel waarin 2-player functionaliteit introduceren. De 2de speler bedient een knop die de volgende functionaliteit heeft.
- Bij het indrukken van de knop veranderd de richting van de sequentie.
- Je bouwt een non-blocking delay in op deze drukknop.
- Bij elke druk op deze knop verhoogt de ingebouwde delay.
- De delay reset als speler mist bij het slaan van de hamer