Microcontrollers
Algemene Introductie
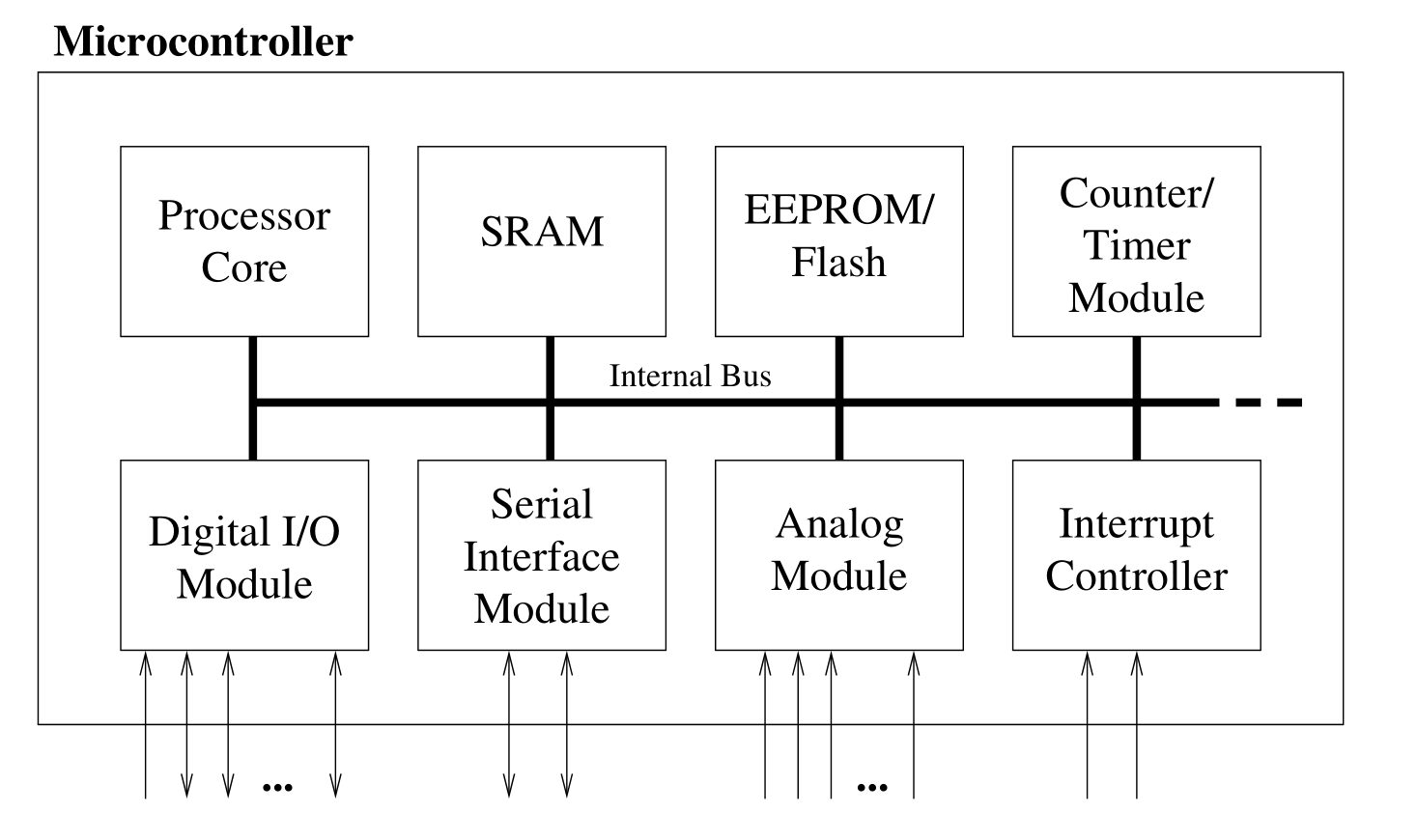
Wat is een microcontroller
- Een Integrated Circuit dat een computer systeem bevat.
- Het is geen CPU maar het bevat er één
- Tot op een zekere hoogte is een microcontroller "self-sustaining"
- Er zijn nog enkele randcomponenten nodig zoals een voeding, programmer, ...
Dus we hebben hardware nodig?
- We maken gebruiken van een ontwikkelingsplatform
- Arduino
- Specifiek: Arduino Nano
- Je krijgt een uitleenkit met alle nodige materialen voor het labo
- Een puur hardware vak?
- Nee, een microcontroller heeft een specifieke functionaliteit die de nodige programmatie vereist
Arduino .... Wat is dat?
- Platform
- Hardware
- Software
- Resources
Arduino: Platform
- Fast electronics prototyping tool
- Doelpubliek: Designers / Elektronica leken
- Voorziet:
- Hardware
- Software
- IDE
- Documentatie
- Veel resources beschikbaar
Arduino platform
- Voordelen
- Inexpensive
- Cross-Platform
- Simple, clear programming environment
- Open source and extensible software
- Open source and extensible hardware
Arduino: Hardware
- Arduino Boards
- Boards zijn gebaseerd rond een microcontroller
- Remember: Arduino != Microcontroller
- Boards voorzien de nodige hardware om met de microcontroller te werken.
- Boards zijn uitbreidbaar met shields
- Verschillende boards met specifieke doelen.
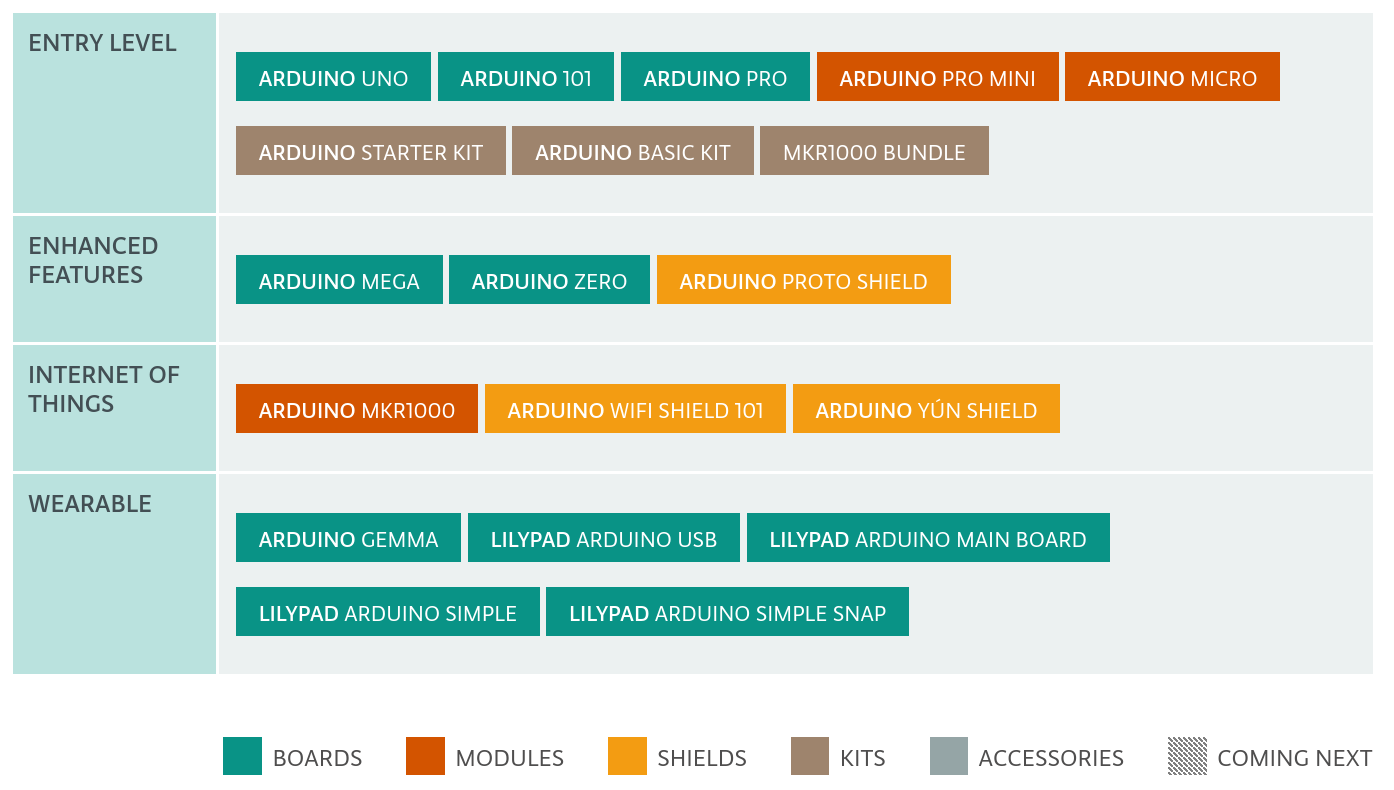
Arduino: Boards
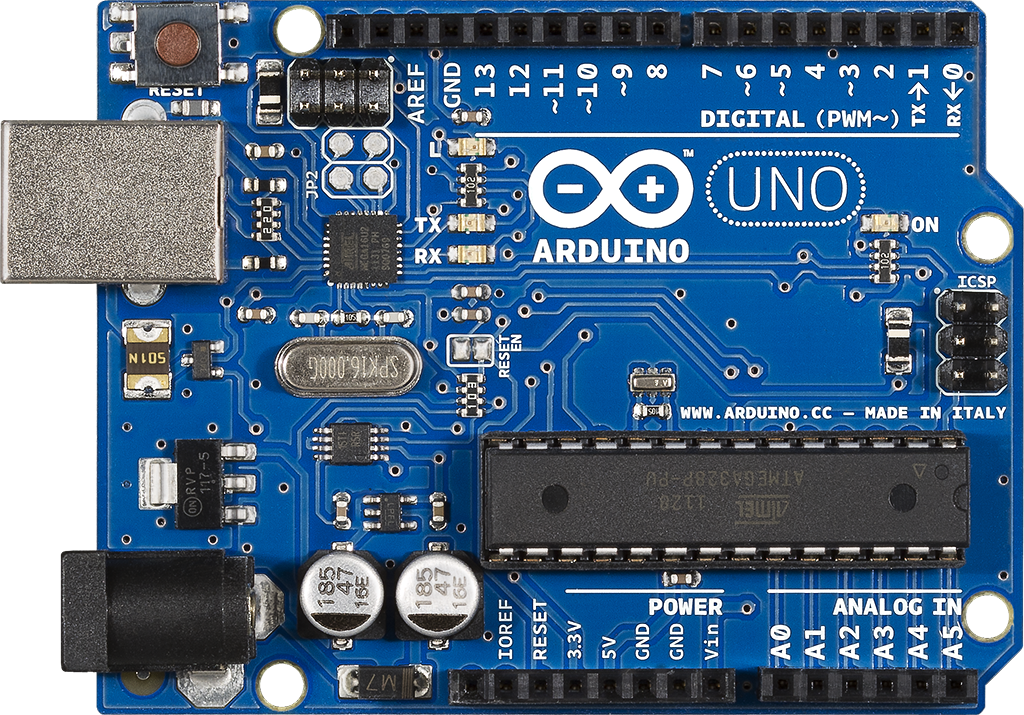
Arduino: Uno
- Reset switch
- USB B Connector:
- Connectie met PC
- Voedingsbron (5V)
- Barrel jack:
- Voedingsbron
- Input spanning 7V - 12V
- Voltage regulator
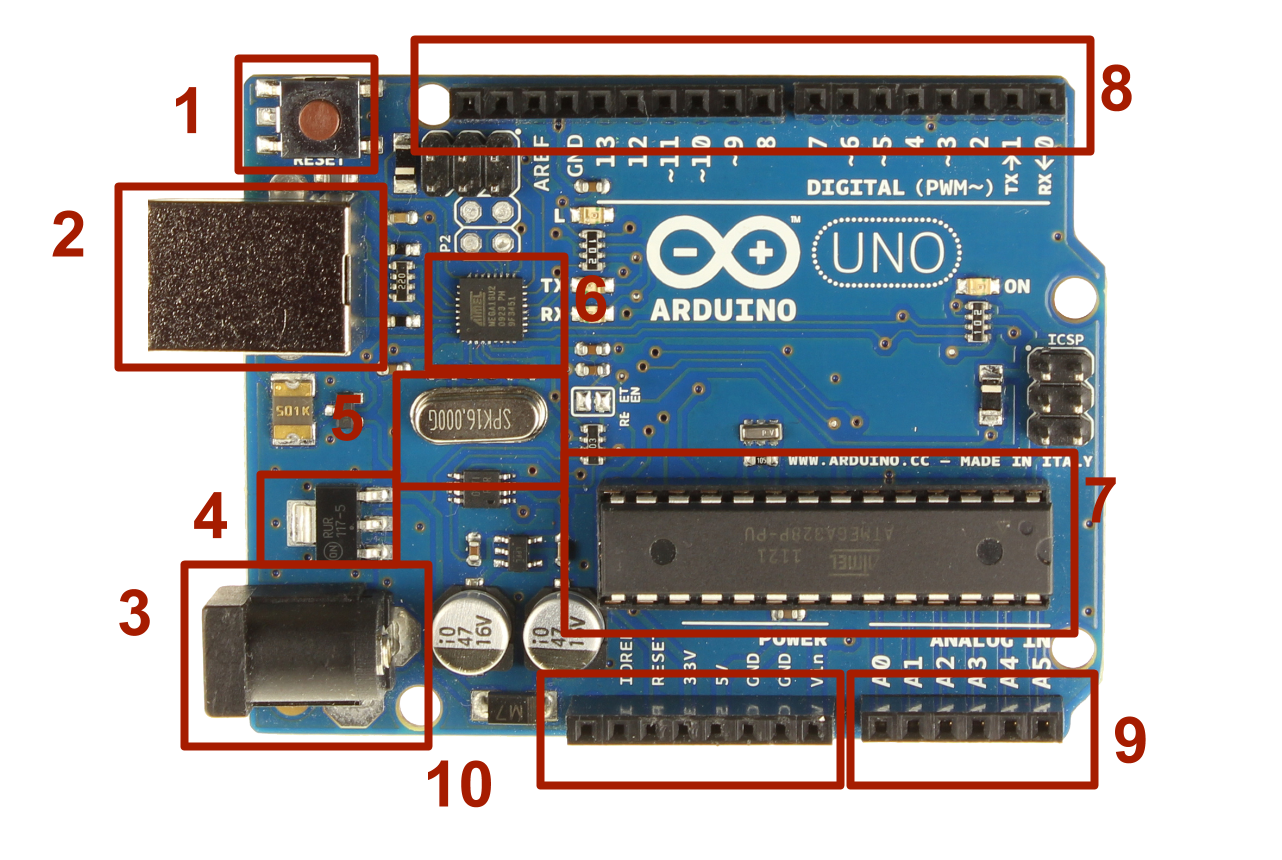
Arduino: Uno
- 16MHz kristal
- ATMega8U2
- Hulp microcontroller
- USB naar UART bridge
- ATmega328p
- Hoofd microcontroller
- 8 bit mcu
- AVR familie
- Brein van het Arduino board
Arduino: Uno
- Digitale IO pinnen
- Analoge IO pinnen
- Voeding / ground / referentie spanningen
Arduino Uno vs Arduino Nano
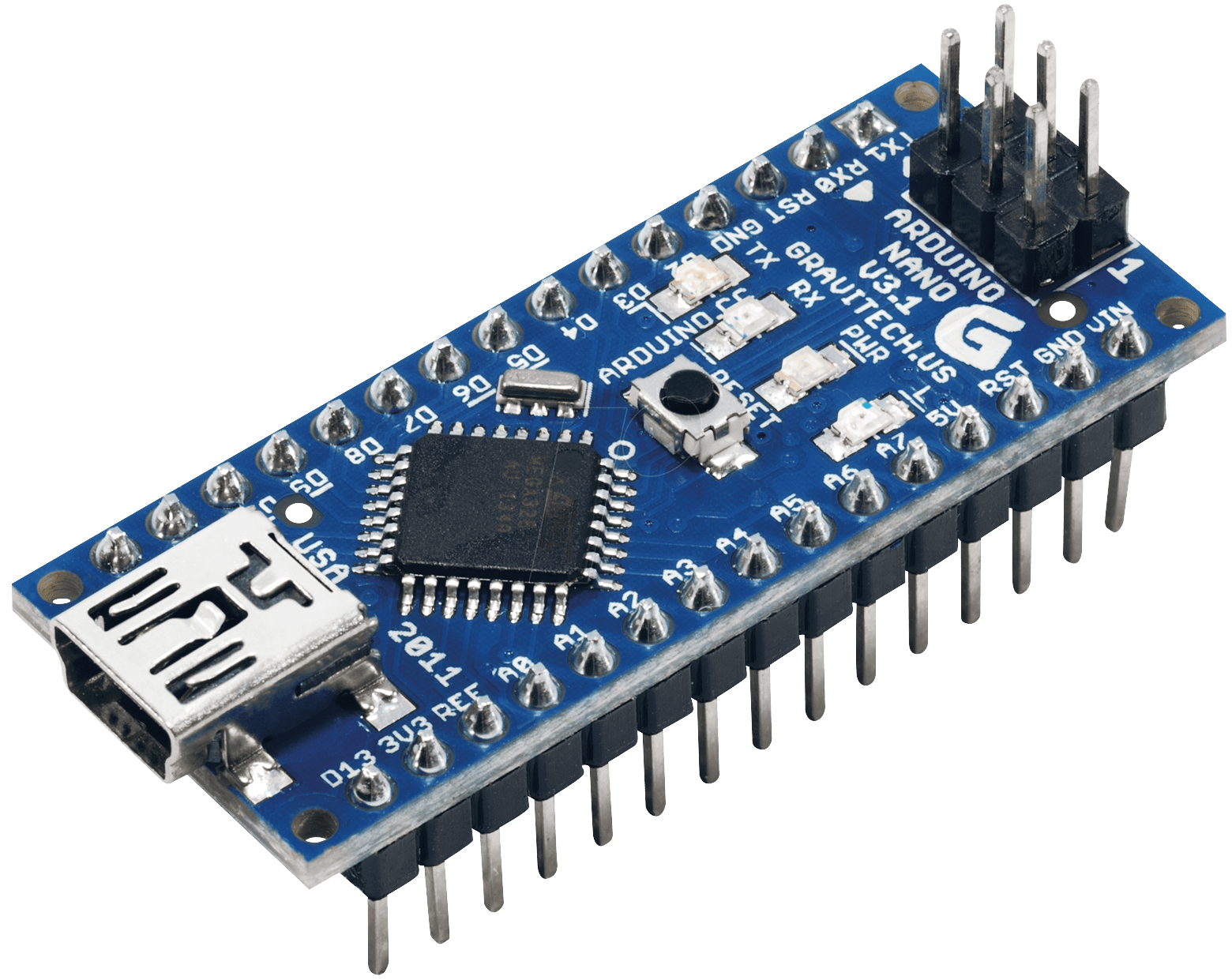
Wat zijn de verschillen
- Vormfactor
- Power opties
Wat zijn de gelijkenissen
- De microcontroller (ATmega328p)
- Pinout
Waarom
- Nano is makkelijk te gebruiken met een breadboard
Waar kunnen een microcontroller voor gebruiken ?
Embedded Systemen



Systemen ....
Een microcontroller is een stukje programeerbare hardware
Op zijn eigen is de functionaliteit gelimiteerd dus zoeken we naar een input en out voor de microcontroller
We hebben dus extra componenten nodig....
We zoeken naar een "toetsenbord, muis en scherm" voor een microcontroller
We zoeken peripherals
Arduino Peripherals
Wat zijn peripherals
- Hardware elementen
- Koppelen extra functionaliteit aan Arduino
- Actuators en Sensors
- Nood aan randcompontenten
- Opbouwen van schakeling
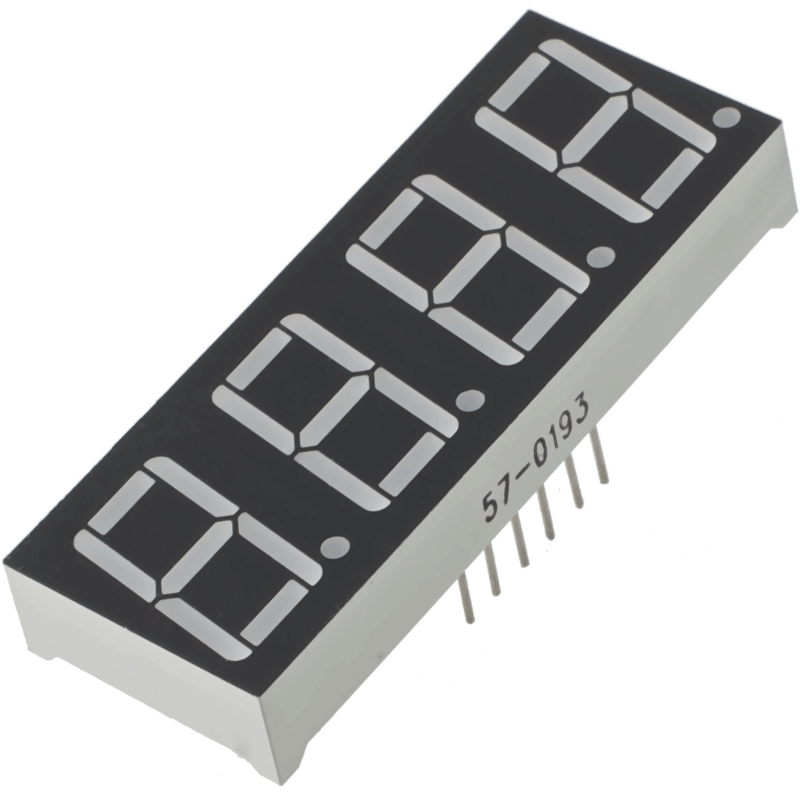
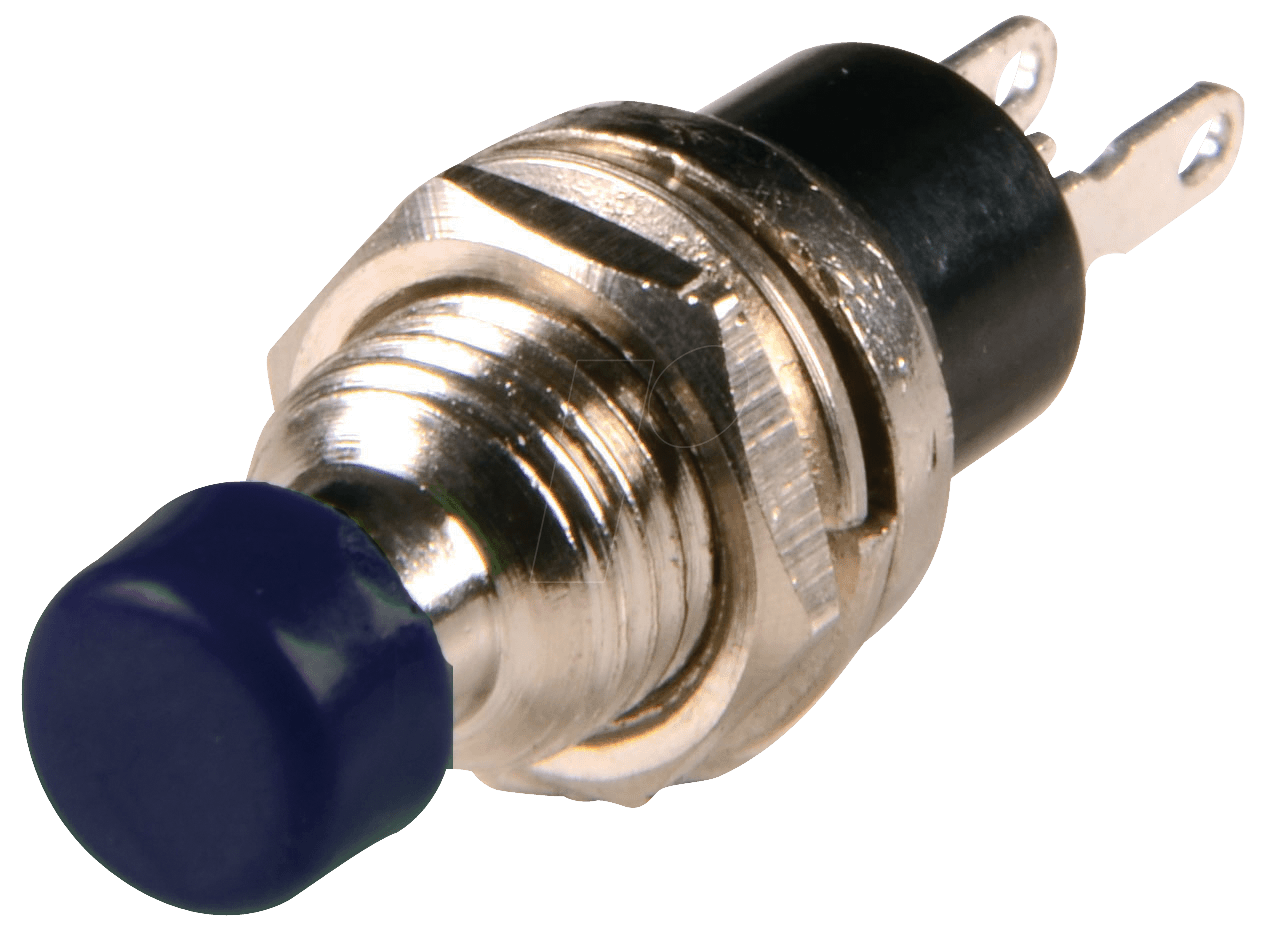
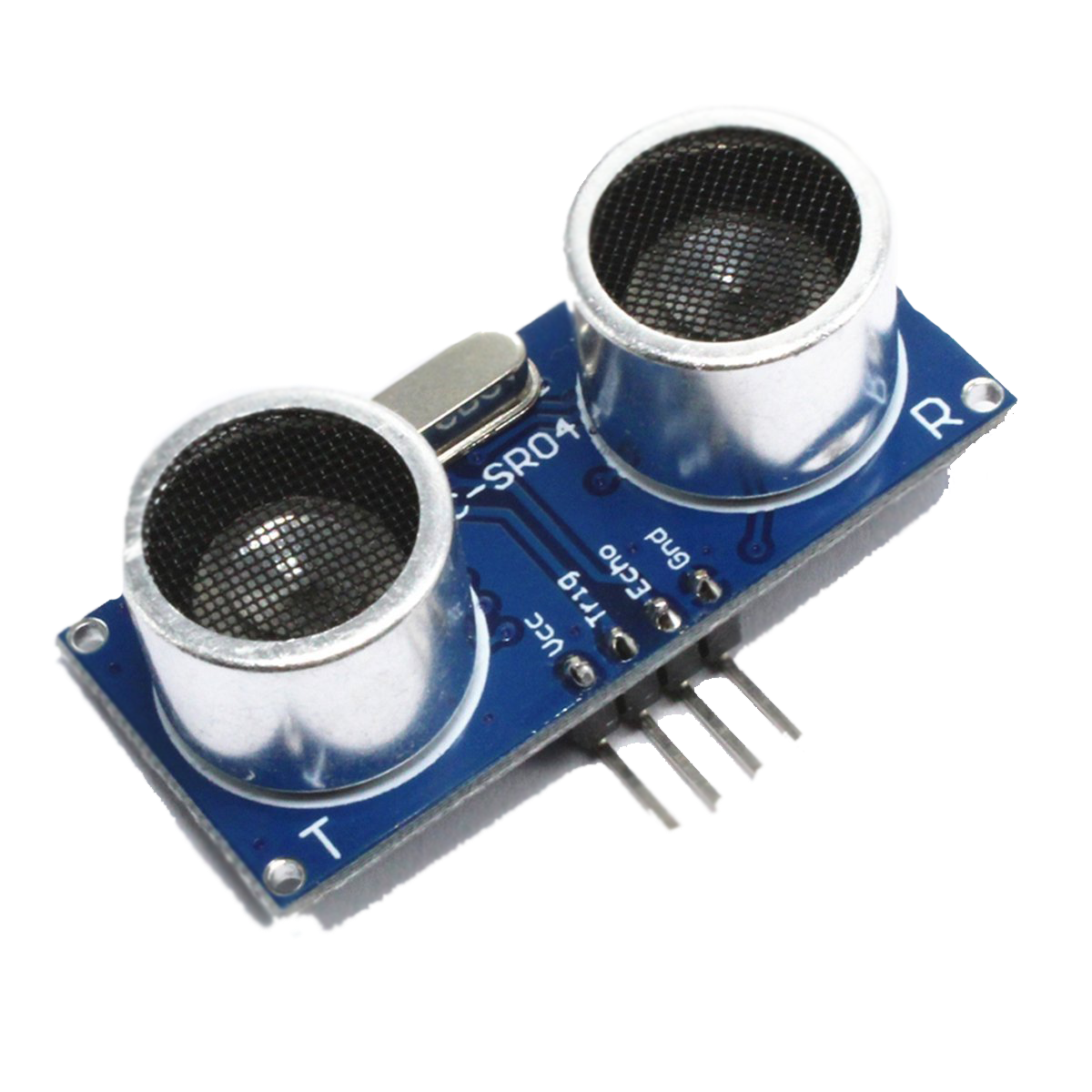
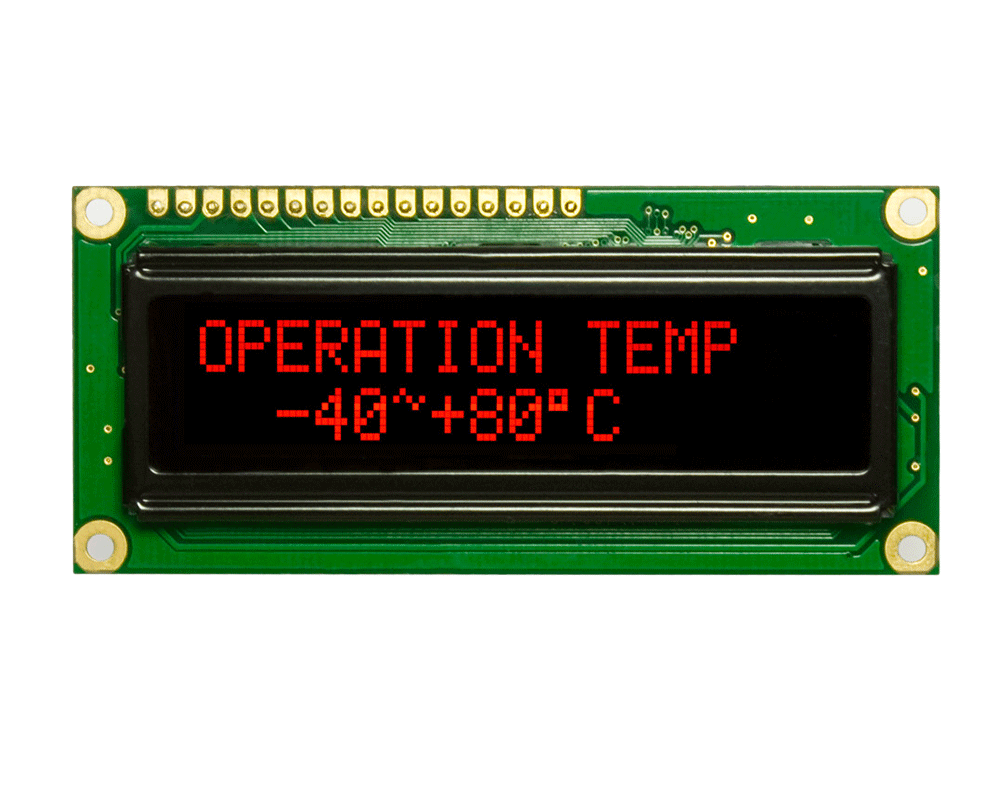
Voorbeelden
- 7 segment 4 digit display
- Pushbutton
- Ultrasone Afstandsensor
- LCD 16x2
Arduino: Shields
- Addons voor de boards
- Extra functionaliteit
- Complexere schakeling van Arduino Peripherals en andere elektronische componenten
- Motorsturing
- LCD
- Communicatie
- Protoboard
- ...
- Standaard vorm factor
- Ready To Use
- Veel resources beschikbaar voor een eigen ontwerp
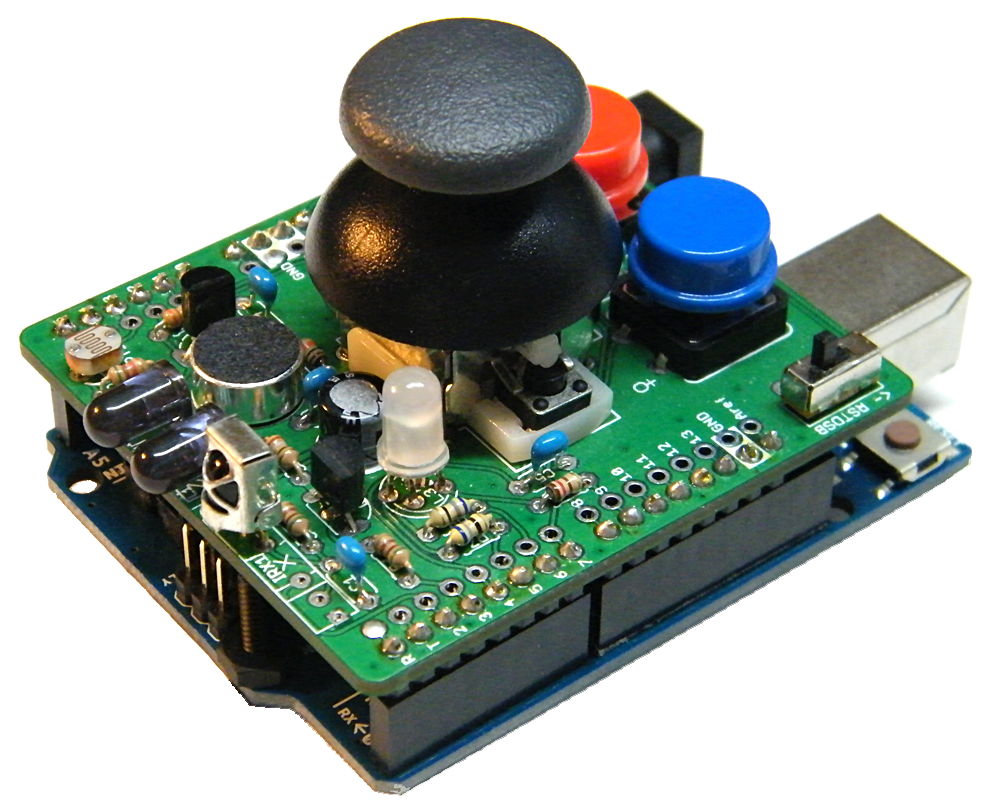
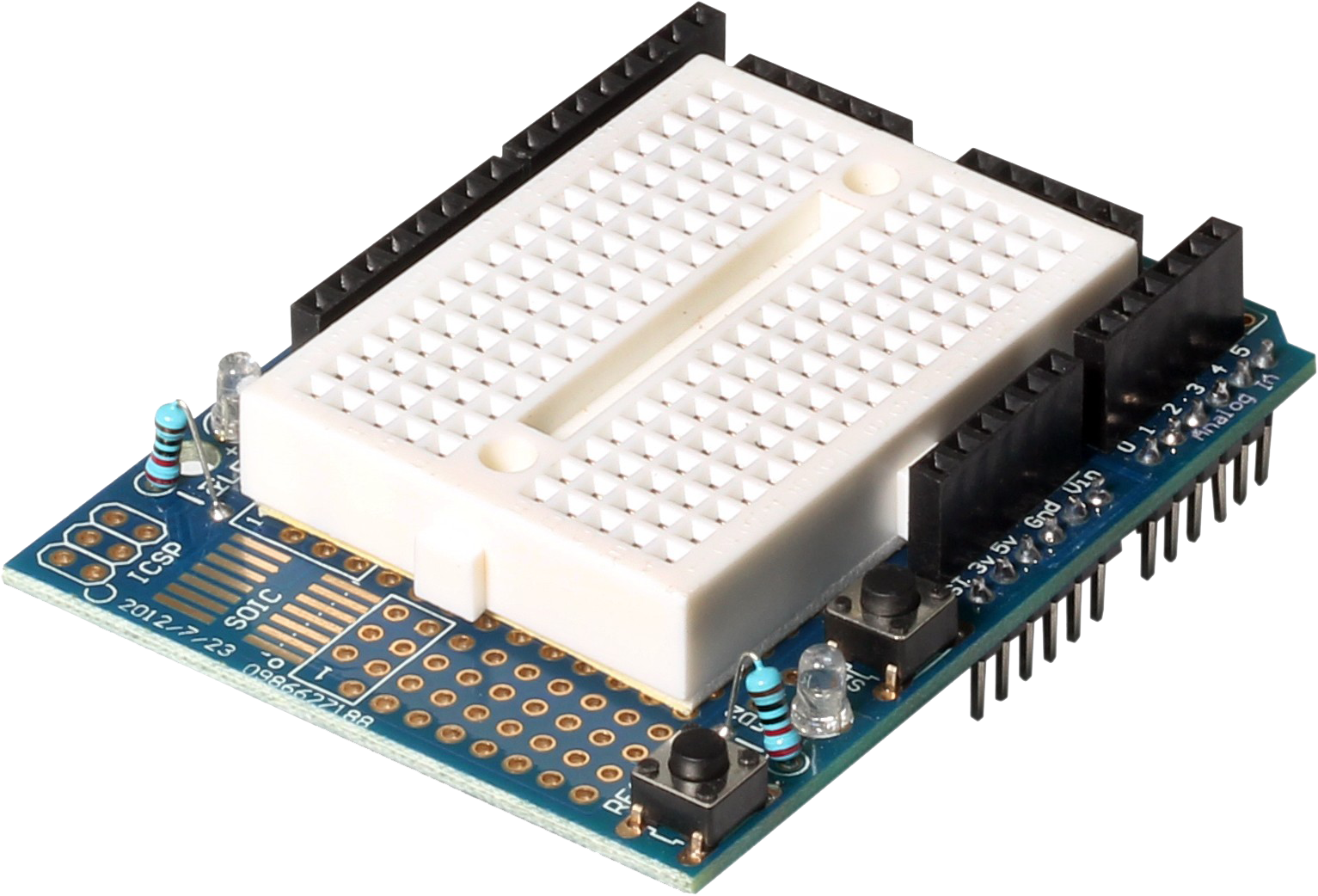
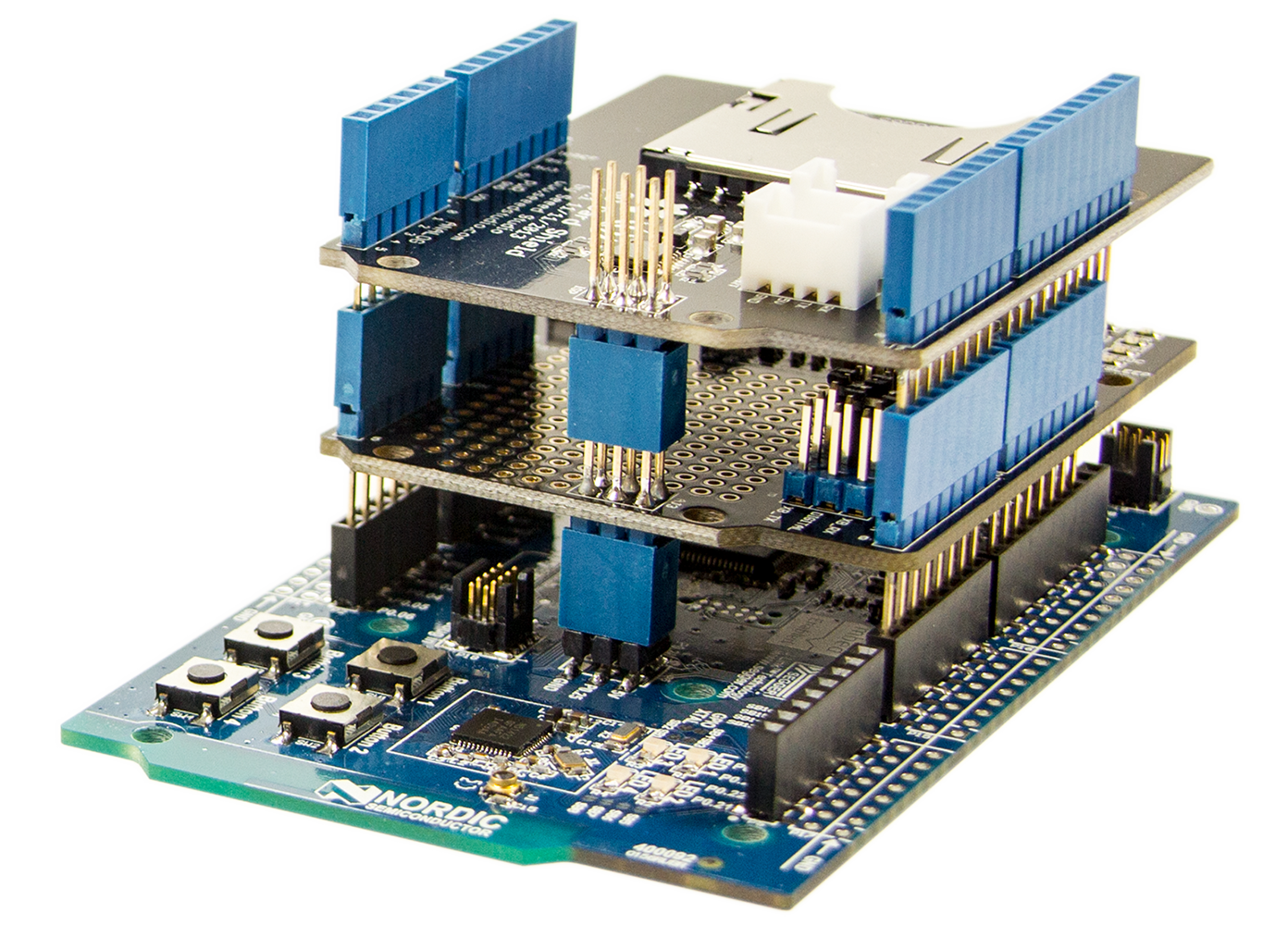
Voorbeelden
- Joystick Shield
- Protoshield
- Shieldstack
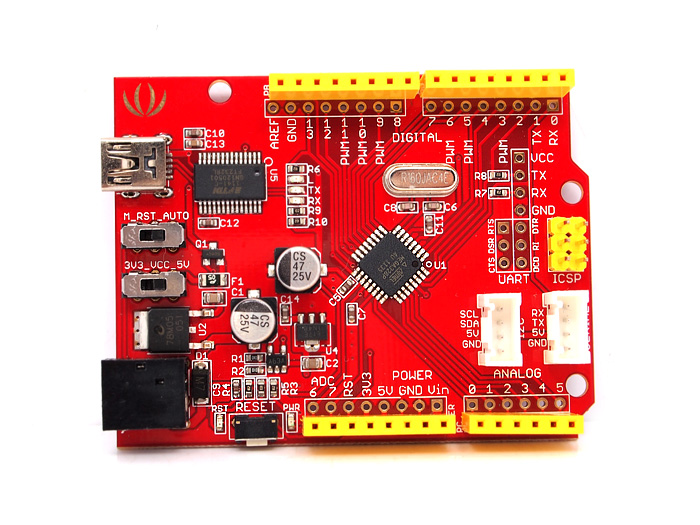
Arduino Open Source Hardware
- Schematics zijn beschikbaar
- Veel klonen beschikbaar
- Goedkopere alternatieven
- Rechtstreeks bestellen uit China
Wat gaan wij met een microcontroller doen?
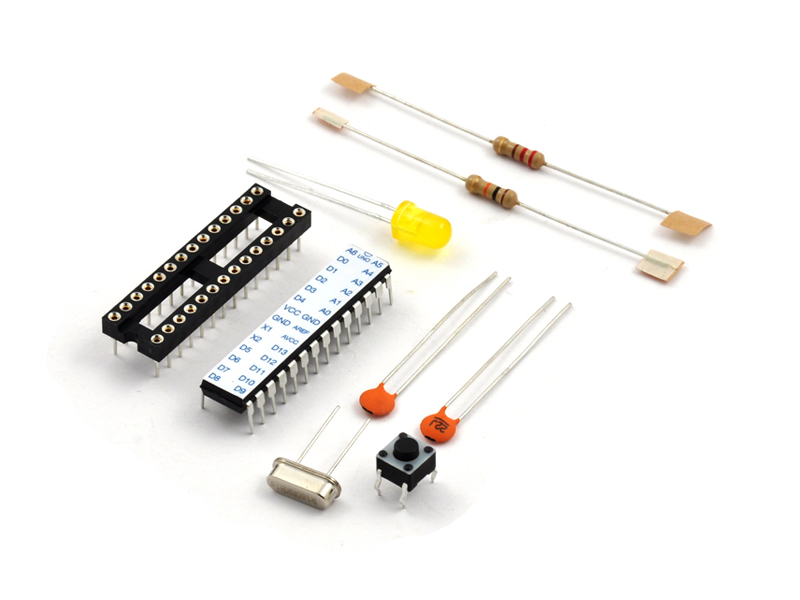
Wat zit er in de Microcontroller Kit ?
| CD4066E Quad Switch | Speakertje | Arduino Nano | CNY17-3 - Optocoupler |
| 23LC1024-I/P - SRAM | Rotary Encoder | LCD 16x2 | ATtiny |
| 330R | 1k | 4k7 | 10k |
| LED GEEL | LED ROOD | LED GROEN | Pushbutton |
| 7 Segment 4 Digit | Breadboard | 10k trimmer | Afstandsensor Ultrasoon |
| USB kabel | Breadboard kabels | Servo | BT module |
| 100 nf | 1 uf | 10 uf | 2N7000 |
Wat gaan wij met een microcontroller doen?
Mogelijke opdrachten
- Kennismaking met Kit, Oefeningen maken op gebruik van individuele componenten, Arduino as DUT
- Opdrachten met verschillende componenten te gelijk / Interrupts Maken van chronometer met 7 segment
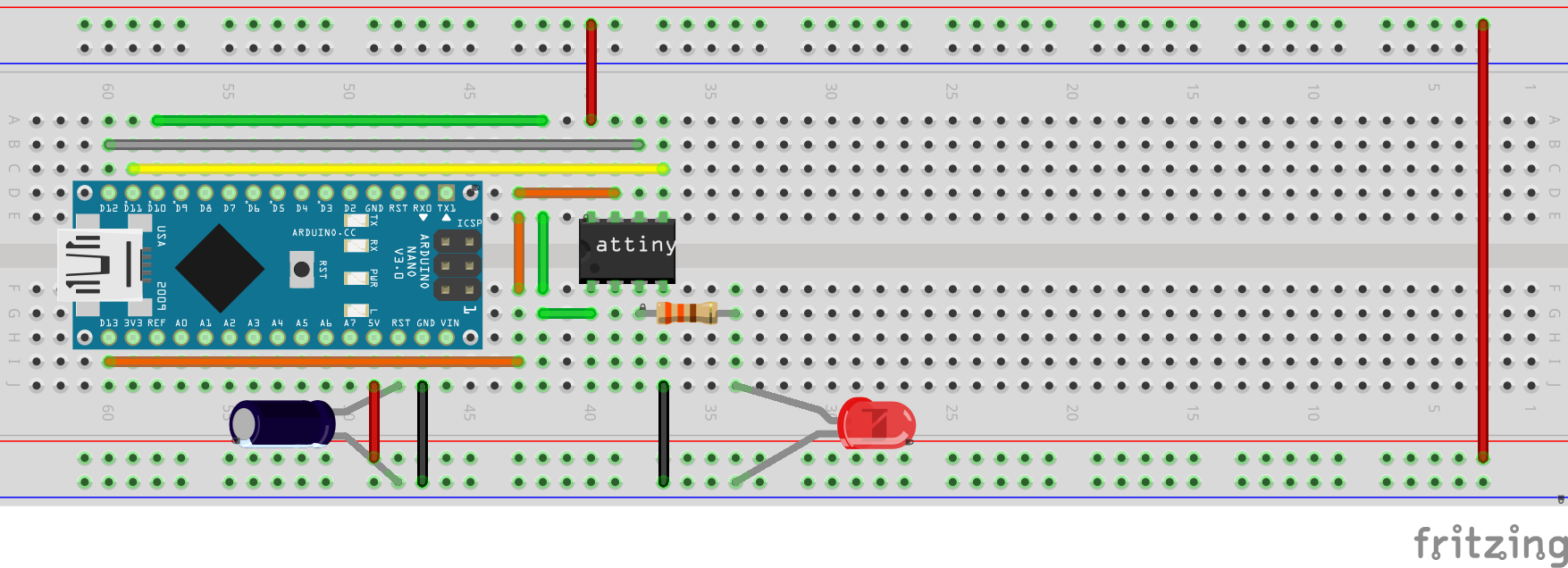
- Werken met een ATtiny
- Seriële communicatie met een ATtiny (i2c)
- Mini Project: Maken van menu LCD met Rotary Encoder
Arduino .... Wat is dat?
- Platform
- Hardware
- Software
- Resources
Arduino: Software
- De microcontroller op een Arduino bord word in C/C++ geprogrammeerd
- Arduino is geen programeertaal
- Beschikbaar stellen van libraries
- Libraries zijn geschreven in C/C++
- Neemt abstractie van de hardware
- Code kan voor meerdere boards compileren
- Werking van de microcontroller is verstopt
- Gebaseerd op:
- Wiring
- Processing
- avr-libc
Programmeren van een Arduino kan op 2 manieren
Blink met de Arduinio libraries
#include <Arduino.h>
void setup()
{
pinMode(LED_BUILTIN, OUTPUT);
}
void loop()
{
digitalWrite(LED_BUILTIN, HIGH);
delay(1000);
digitalWrite(LED_BUILTIN, LOW);
delay(1000);
}
blink zonder Arduino libraries
#include <avr/io.>
#include <util/delay.h>
int main(void)
{
DDRB = 1 << 5;
while (1)
{
_delay_ms(500);
PORTB ^= 1 << 5;
}
return 0;
}
Dit was het eerste deel van Microcontrollers
Het vak is Microcontrollers niet Arduino
Arduino is een simpele manier om met een microcontroller prototypes te maken
Arduino's originele doelpubliek waren designers
Als studenten Elektronica - ICT willen we weten hoe een microcontroller van binnen werkt
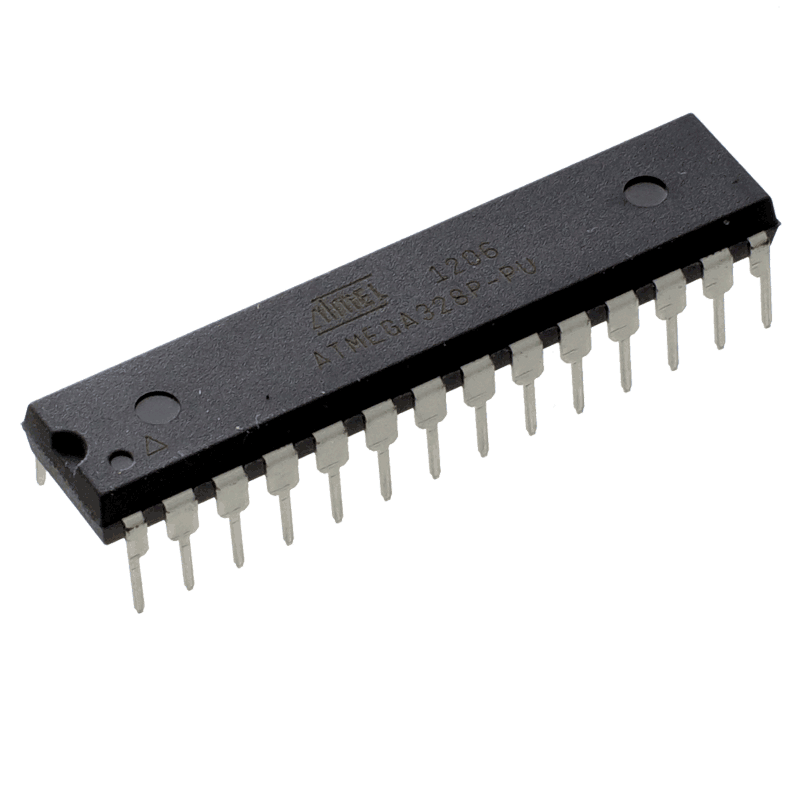
Welke Microcontroller staat er op de Arduino Nano
ATMega328p
ATmega328p
- Lid van de AVR Microcontroller familie
- Ontworpen door Atmel
- 8bit (bus breedte)
- Aangepaste harvard architectuur
- Flash memory ipv EEPROM
- Populair door makkelijk beschikbare tools en Arduino
ATmega328p
- 8bit mcu
- 2 timers
- 6 PWM kanalen
- 8 kanaals 10bit adc
- 6 kanaals 8bit adc
- UART
- SPI
- I²C
- Watchdog
- Comperator
- 23 programmeerbare lijnen
ATmega Datasheet
- Samenvatting
- Specificaties
- Functioneel blokdiagram
- Pinout
- Absolute maximale waardes
- Waarheidstabellen
- Timing diagrammen
- Mogelijke toepassingen
- Tutorial: Datasheets lezen
- FYI: Datasheets ATmega328p - 444 blz.
Tegen het eind van het semester moet jullie dit documenten begrijpen en gebruiken om microcontroller toepassing te maken
Waarom?
Blink met de Arduinio libraries
#include <Arduino.h>
void setup()
{
pinMode(LED_BUILTIN, OUTPUT);
}
void loop()
{
digitalWrite(LED_BUILTIN, HIGH);
delay(1000);
digitalWrite(LED_BUILTIN, LOW);
delay(1000);
}
Compiled size: 1034 bytes (3.2%)
blink zonder Arduino library
#include <avr/io.>
#include <util/delay.h>
int main(void)
{
DDRB = 1 << 5;
while (1)
{
_delay_ms(500);
PORTB ^= 1 << 5;
}
return 0;
}
Compiled size: 158 bytes (0.5%)
De hardware kunnen we ook verkleinen
Oplossing Mogelijk Vaardigheidsexamen
enum states {IDLE = 'i', SET = 's', GET = 'g', TOGGLE = 't', COMPARE = 'c'};
uint8_t set_value, last_adc_val;
volatile uint8_t state = IDLE;
uint8_t last_state = GET;
void setup() {
Serial.begin(9600);
ADMUX |= (1 << REFS0) | (1 << MUX2) | (1 << MUX0);
ADCSRA |= (1 << ADPS2) | (1 << ADPS1) | (1 << ADPS0) | (1 << ADATE) | (1 << ADEN) | (1 << ADSC);
DDRD |= (1 << DDD3);
DDRB |= (1 << DDB1) | (1 << DDB2) | (1 << DDB3);
EICRA |= ((1 << ISC10) | (1 << ISC11)) ;
EIMSK |= (1 << INT1);
TCCR0A = 0;
TCCR0B = 0;
TCCR1A = 0;
TCCR1B = 0;
TCCR1A |= (1 << WGM10) | (1 << WGM00) | (1 << COM1A1) | (1 << COM1B1);
TCCR1B |= (1 << CS11) | (1 << CS10);
TCCR2A |= (1 << WGM20) | (1 << COM0A1);
TCCR2B |= (1 << CS22);
}
ISR(INT1_vect) {
state = COMPARE;
}
void set_values() {
Serial.print("Geef de waarde in: ");
set_value = Serial.parseInt();
Serial.println(set_value);
}
void toggle() {
EIMSK ^= (1 << INT1);
}
void compare() {
int diff = set_value - ADC / 4;
if (diff < 0) {
OCR2A = 0;
OCR1AL = abs(diff);
}
if (diff > 0) {
OCR1AL = 0;
OCR2A = abs(diff);
}
}
void loop() {
if (Serial.available()) state = Serial.read();
if (state != last_state) {
switch (state) {
case (IDLE):
Serial.println("Entered Idle State");
break;
case (SET):
set_values();
break;
case (GET):
Serial.println("Current ADC value: ");
Serial.println(ADC / 4);
break;
case (TOGGLE):
toggle();
break;
case (COMPARE):
compare();
break;
}
last_state = state;
}
if (last_state != TOGGLE) OCR1BL = ADC / 4;
}
Dit was de contextuele schetsing van het vak Microcontrollers
Nu de praktische zaken
Lesgevers
Geert Vanhulle
- Labos in Module 1
- Theorie in Module 2
- geert.vanhulle@ap.be
Maarten Luyts
- Labos in Module 2
- Theorie in Module 1
- maarten.luyts@ap.be
Heb je vraag? Stuur een email naar ons beide
Voorlopige Planning
| Week | Theorie | Labo | |||
|---|---|---|---|---|---|
| Wie | Wat | Wie | Wat | Deadline studenten | |
| M1W1 | MALU | Introductie | GVH | Kennismaking Kit, Beginner Tutorials, DUT | M1W3 |
| M1W2 | MALU | Algemene IO operaties + Interrupts | GVH | Basis combinatie opdracht (gebruik verschillende componten) | M1W4 |
| M1W3 | MALU | Serïele communicatie | GVH | Werken met een ATtiny | M1W5 |
| M1W4 | MALU | C/C++ Fundementals + Libraries maken | GVH | Seriële communicatie met een ATtiny | M1W6 |
| M1W5 | MALU | Bit Operaties + Intro IO operaties (ADC) | GVH | Mini Project: Maken van menu LCD met Rotary Encoder (individueel) | M1EX1 |
| M1W6 | MALU | IO Operaties | GVH | Basis IO Operaties met registers #1 | M1EX1 |
| M1EX1 | Vaardigheidstoets + Tonen werking Mini Project | M1EX1 |
Voorlopige Planning
| Week | Theorie | Labo | |||
|---|---|---|---|---|---|
| Wie | Wat | Wie | Wat | Deadline studenten | |
| M2W1 | GVH | Interrupts | MALU | Basis IO Operaties met registers #2 | M2W3 |
| M2W2 | GVH | Interrupts | MALU | Interrupts #1 | M2W4 |
| M2W3 | GVH | TImers | MALU | Interrupts #2 | M2W5 |
| M2W4 | GVH | TImers | MALU | TImers #1 | M2W6 |
| M2W5 | GVH | Seriële communicatie | MALU | TImers #2 | M2W7 |
| M2W6 | GVH | Power Managment | MALU | Seriële communicatie | M2W7 |
| M2W7 | GVH | Reserveles | MALU | Mini Test | |
| M2EX1 | |||||
| M2EX2 | |||||
| M2EX3 |
Indienen van labos
- Labos indienen voor de deadline
- Labos worden niet nagekeken doorheen het jaar
- Wenst u feedback, maak de opstelling en laad de code op de Arduino en toont dit tijdens de labos
- Tijdens het vaardigheidsexamen kunnen er mogelijke vragen zijn over jouw oplossing
Evaluatievorm
| Kennistoets | 30% | Digitaal examen |
| Vaardigheidsexamen | 50% | Mondeling praktisch examen |
| Vaardigheidstoets | 20% | 2 Testmomenten doorheen het jaar. |
Regels
- Optijd komen
- Bent u te laat, dan moet je inkom betalen
- Betalen doe je door het opkuisen van het labo
- Lees: the job of your life
- Geen eten, alleen drinken in een sluitbare container
- U komt niet in de kasten in het labolokaal
- Werk in rust
- Vaste werkplek in het labo
- Heb respect voor het materiaal
- Ruim op na het labo
Getting started met Arduino
- Hoe maak ik een schakeling?
- Programmeeromgeving ?
- Hoe krijgen we onze code op de Arduino ?
- Basisoefening ?
Hoe maak ik een schakeling ?
Eerst moeten we weten wat de pinnen van een Arduino doen
We kunnen dit opzoeken in de datasheet
Hierin staan de pinnen van de ATMega328P niet die van de Arduino. Er is wel een mapping
We vinden dit terug in een pinout diagramma
We kunnen dit opzoeken in de datasheet
Hierin staan de pinnen van de ATMega328P niet die van de Arduino. Er is wel een mapping
We vinden dit terug in een pinout diagramma
Pinout Takeaway
De Arduino pinnen zijn gemapt op de pinnen van de microcontroller
Specifieke functionaliteit van de microcontroller zijn gemapt op specifieke pinnen
D0 en D1 zijn RX en TX Pinnen --> Communicatie met PC
D2 en D3 zijn interrupt pinnen --> Zie later
D3,D5,D6,D9,D10,D11 zijn PWM pinnen --> AnalogWrite
IO Pinnen
- Literatuur: General Purpose In/Out (GPIO)
- Doorverbinding van de pinnen van de ATmega328P
- 2 Onderverdelingen
- Digitaal (0 - 1)
- Analoog (0 - 1023)
- Pinnen kunnen vasthangen aan specifieke functionaliteit
- Er gelden stroom limieten voor de pinnen
Digitale IO Pinnen
- Sturen een logisch signaal
- HIGH (5v)
- LOW (0v)
- 2 richtingen
Analoge IO Pinnen
- Kan spanningen uitlezen
- Zet deze spanning om naar een discrete waarde
- Mapping van 0v tot 5v naar een waarde van 0 tot 1023
- Kan een "spanning schrijven"
- Een digitale waarde omzetten in fysisch signaal
- Mapping van de waarde 0 tot 255 naar een signaal van 0v tot 5v
- Kan dubbel gebruikt worden als een digitale pin
Arduino Programmeer omgeving
- Arduino IDE installeren
- Example openen
- Code uploaden
Arduino: IDE
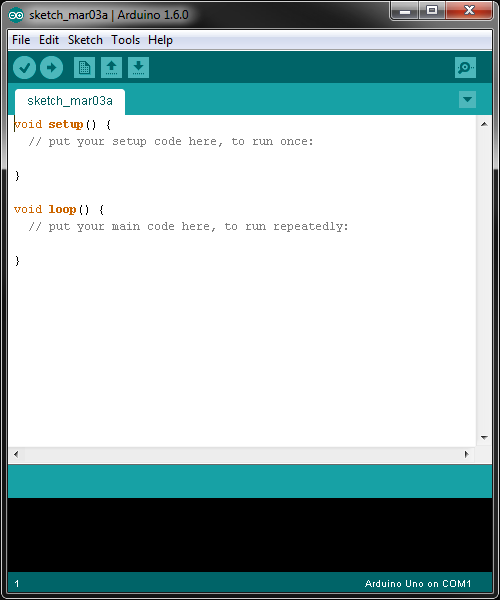
Arduino: IDE
- Verify: Compileert de code met avr-gcc
- Upload: Compileert de code met avr-gcc en upload de code met avrdude
- New
- Open
- Save
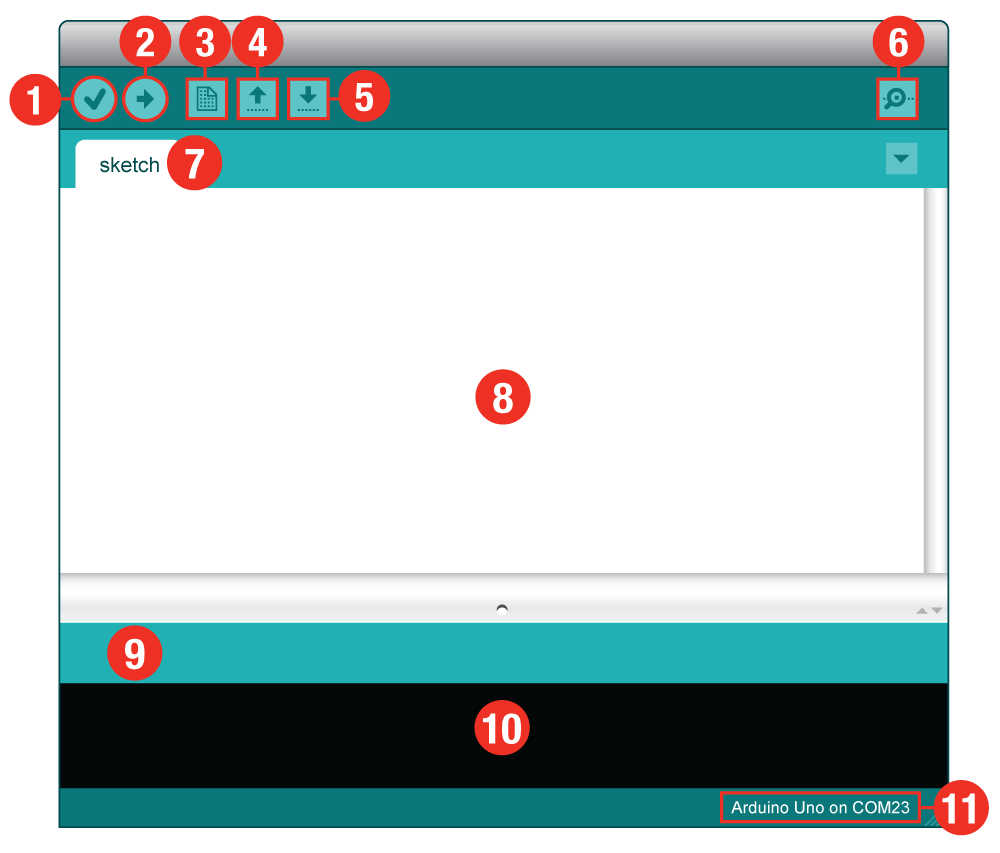
Arduino: IDE
- Serial Monitor
- Filename
- Sketch
- Statusbar
- Build output
- Board settings
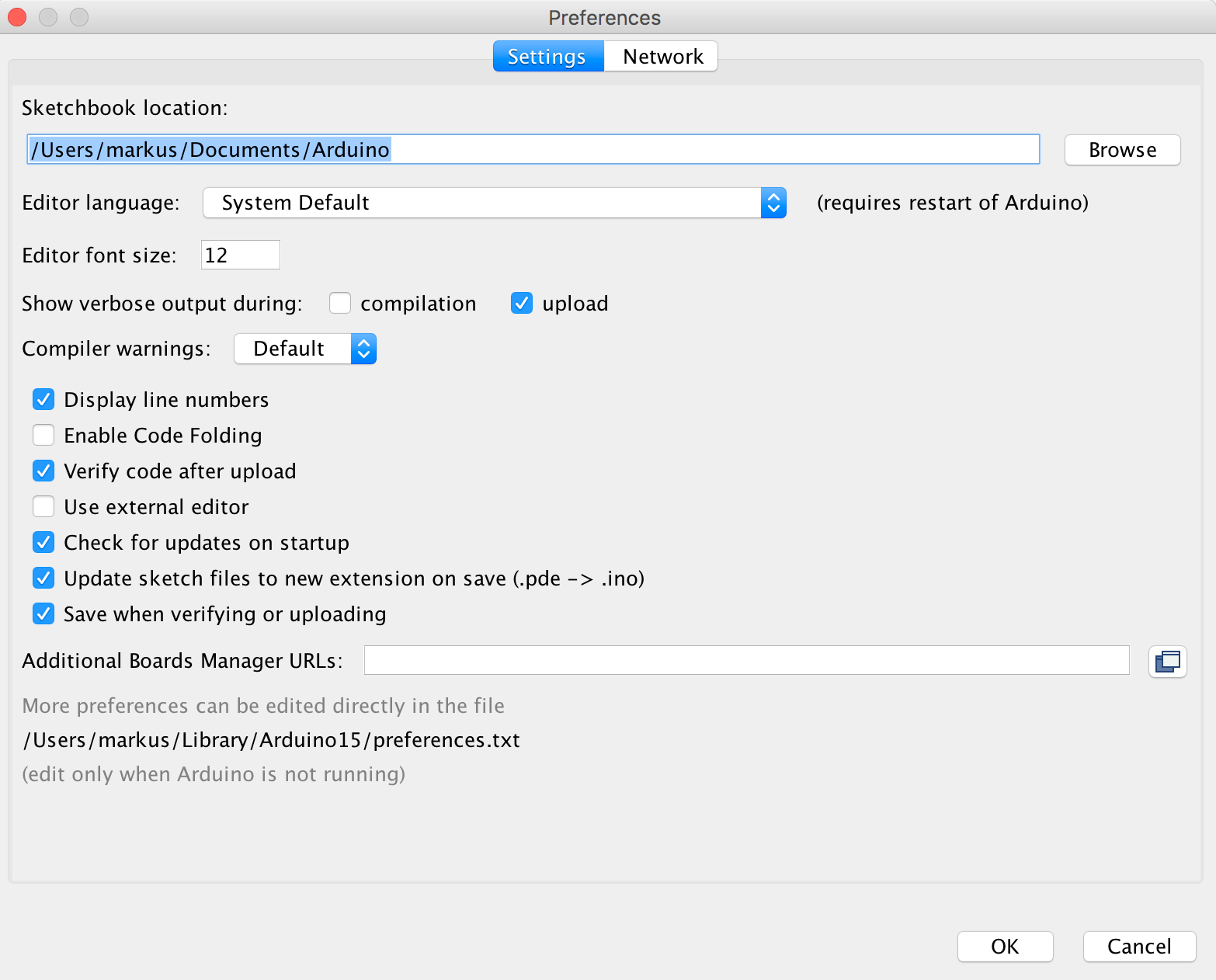
Arduino: IDE
- Aan te raden instellingen
- Display line numbers
- Code folding
Sketches
- Sketches = Arduino programma's
- Examples sketches beschikbaar in de Arduino IDE
- .ino extensie
- 2 grote componenten
void setup();void loop();- Documentatie
Blink Sketch
void setup() {
pinMode(LED_BUILTIN, OUTPUT);
void loop() {
digitalWrite(LED_BUILTIN, HIGH); // turn the LED on (HIGH is the voltage level)
delay(1000); // wait for a second
digitalWrite(LED_BUILTIN, LOW); // turn the LED off by making the voltage LOW
delay(1000); // wait for a second
}
Sketches
| void setup() | void loop() |
| Loopt 1 maal | Eindeloze loop |
| Initiële setup | Logica |
Arduino: Documentatie
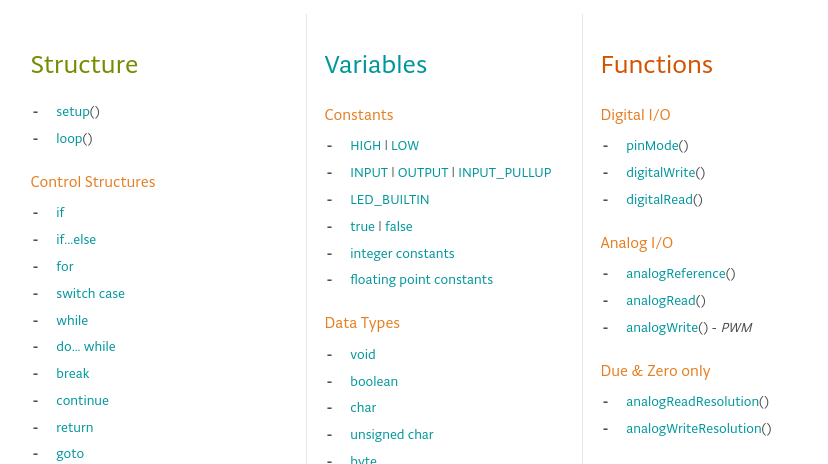 Arduino Reference
Arduino Reference
Code Uploaden
- Example sketch openen File > Examples > 01. Basic > Blink
- COM Poort selecteren Tools > Port > COMX
- Board selecteren Tools > Board > Arduino Nano / Duemilanove / Uno
Getting Started: Programmatie




Programmer
- Extern toestel data schrijft op het geheugen van de microcontroller
- Dit is omslachtig
- Extra hardware
- Compatibiliteit
- Wordt nog gebruikt voor productie
- Voor ontwikkeling: Bootloader
- Arduino as ISP

Bootloader
- Hetzelfde concept als de bootloader van een computer
- Vertelt CPU waar het operating systeem staat
- Ook mogelijk om het "OS" te overschrijven
- Werking Arduino Nano
- Data wordt verstuurt vanuit PC
- ATmega8u2 zet data om van USB naar UART
- ATmega8u2 reset ATmega328p
- ATmega8u2 stuurt data door naar ATmega328p
- ATmega328p detecteert data op de UART binnen een tijds interval na reset
- Bootloader op ATmega kopieert data naar het flash geheugen
- Tijdsinterval afgelopen, ATmega328p boot met bestaande code
Basis IO Operaties
- pinMode
- DigitalRead
- DigitalWrite
- analogRead
- analogWrite
PinMode
void setup() {
pinMode(LED_BUILTIN, OUTPUT);
pinMode(POTPIN, INPUT);
pinMode(BTNPIN, INPUT_PULLUP);
void loop() {
//doSomething
}
- Een pin kan 3 states aannemen
- OUTPUT: schrijven naar de pin
- INPUT: lezen van de pin
- INPUT_PULLUP: INPUT + voorgeschakelde weerstand
- Dezelfde functie voor de analoge en digitale pinnen
- Meer info: klik hier
DigitalWrite
void setup() {
pinMode(LED_BUILTIN, OUTPUT);
void loop() {
digitalWrite(LED_BUILTIN, HIGH);
delay(1000);
digitalWrite(LED_BUILTIN, LOW);
delay(1000);
}
- Schrijven van constante waarde
- Hoog (5V)
- Laag (0V)
- Gebruik: Aansturen LED, Signaal geven aan IC(Motorsturing)
- Meer info: klik hier
DigitalRead
void setup() {
pinMode(pushButton, INPUT);
pinMode(LED_BUILTIN, OUTPUT);
}
void loop() {
// read the input pin:
int buttonState = digitalRead(pushButton);
digitalWrite(LED_BUILTIN, buttonState);
}
- Uitlezen van een pin
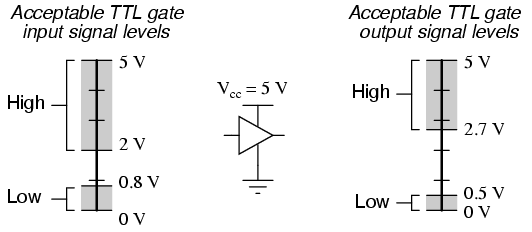
- Specifieke treshold (TLL niveaus) voor de omzetting naar een constante waarde
- High (1)
- Low (0)
- Gebruik: Uitlezen drukknop
- Meer info: klik hier
AnalogWrite
void setup() {
pinMode(ledPin, OUTPUT);
}
void loop() {
for (int fadeValue = 0 ; fadeValue <= 255; fadeValue += 5) {
analogWrite(ledPin, fadeValue);
delay(30);
}
for (int fadeValue = 255 ; fadeValue >= 0; fadeValue -= 5) {
analogWrite(ledPin, fadeValue);
delay(30);
}
}
- Schrijven van een voltage naar een pin
- max 255 - 5V
- min 0 - 0V
- PWM
- Gebruik: Precies aansturen LED, Precies signaal geven aan IC(Motorsturing)
- Meer info: klik hier
AnalogRead
void setup() {
Serial.begin(9600);
}
void loop() {
int sensorValue = analogRead(A0);
Serial.println(sensorValue);
delay(1);
}
- Uitlezen van een variabel voltage signaal
- max 255 - 5V
- min 0 - 0V
- Gebruik: Uitlezen van een potentiometer, Uitlezen van een NTC, Uitlezen van sensorsignaal
Oefeningen
- Aansturen van LED (met en zonder PWM)
- Uitlezen van PWM Signaal en Potentiometer Uitlezen van een drukknop
Projecten Smart Systems
Arduino Summer School @ St Polten
IoT Projecten
Zordon
Smart buildings